PLC处理输入、输出数据的类型有:脉冲量入(PI)、开关量入(DI)、模拟量入(AI)、脉冲量出(PO)、开关量出(DO)及模拟量出(AO)6种。与此对应的、与脉冲相关的控制大体有这么几种可能的组合:
1)脉冲量入(PI),开关量出(DO)
这种控制是输入的是脉冲量,而输出是开关量,用于ON/OFF输出的闭环控制。
若脉冲频率不高,又是单相的,如每秒不到100次,用普通的输入点,即可读入脉冲量。频率稍高的,又是单相的,可用定时或外中断的子程序的读入脉冲量。若脉冲频率更高,或是双相的,则要用PLC的高速计数功能读入脉冲量。
在脉冲读入的同时,还要进行脉冲量的累计。如用了PLC的高速计数功能,在读入脉冲的同时,即行这个累计,即计数。计数的或加、或减,则视脉冲输入情况而定。
如未用PLC的高速计数功能,那可用计数器或加一(INC)指令读脉冲,就既可读入,又可累计。
计脉冲的同时还要不断地与设定值(给定值)进行比较。并根据比较结果产生相应的开关量(ON/OFF)输出。一般的位置、运动行程控制,或模拟量的ON/OFF控制用的就是这个办法。
如要控制速度,一般要计算读入的脉冲频率。并把这个频率与设定值比较,再确定开关量输出。
在这种控制中,比较是关键,所以又称“比较控制”。
(2)脉冲量入(PI),模拟量出(AO)
这种控制输入的是脉冲量,而输出是模拟量,这可用于闭环控制,也可是开环控制。
脉冲量读入同上。不过多是要计算频率。用频率的大小代表某物理量的大小。所以这个频率也可作为是反馈量,或称被控量、调节量。
模拟量输出是控制量。它从给定量与反馈量比较,并按一定算法,如PID,处理后得到的值,然后通过模拟量输出模块再加载给被控对象。
这种控制被控对象是脉冲量,又是闭环的,故也可称为脉冲量闭环控制。
脉冲量入、模拟量出也可用于开环控制。如一个模拟量(PLC对其控制)要跟踪一个脉冲量(用PLC高速计数功能去读该运动发出的脉冲)的变化就是开环控制。这也就是比例控制。
(3)模拟量入(AI),脉冲量出(PO)
这种控制是输入的是模拟量,而输出为脉冲量,可是闭环控制,也可是开环控制。
模拟量可作为反馈量,或称被控量、调节量。但控制量是脉冲量。从给定量、反馈量,按一定算法得出控制量,在上一章已作了很多介绍。而得出的控制量后,怎么产生脉冲量输出有三种可能可供选择:
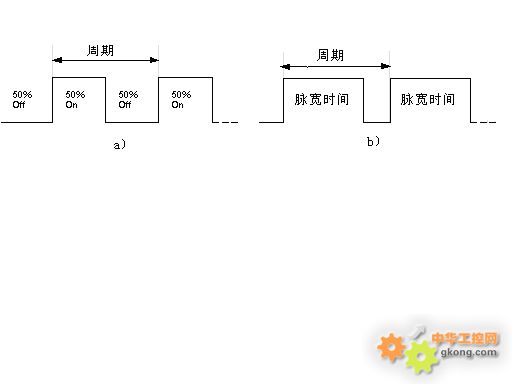
输出固定频率的脉冲,但脉冲数量可调,其值取决于控制量;
连续输出脉冲,但频率可调,其值取决于控制量;
连续输出固定频率的脉冲,但脉宽可调,其值取决于控制量。
选定后,作必要的设定,再选用相应的处理指令,即可达到目的。
这种控制被控量是闭环的,又用有脉冲量,故故应算是脉冲量闭环控制的一种。
模拟量入、脉冲量出也可用于开环控制。如一个脉冲量(PLC对其控制)要跟踪一个模拟量(用PLC读该值)的变化,就是开环控制。这也就是比例控制。
(4)脉冲量入(PI),脉冲量出(PO)
这种控制是输入、输出都是脉冲量。用它可实现闭环控制,也可实现开环控制。
在前一章,讨论的模拟量的种种闭环控制(含PID、模糊等智能控制),一般也都可用它实现。与前不同的只是,这里用的都是脉冲量,而以前用的都是模拟量。
这种控制被控对象也是脉冲量,又也是闭环的,故也可称为脉冲量闭环控制。
脉冲量入、脉冲量出也可用于开环控制。如一个运动(PLC的脉冲输出控制)要跟踪另一个运动(用PLC高速计数功能去读该运动发出的脉冲)就是开环控制。也就是比例控制。
(5)开关量入(DI),脉冲量出(PO)
这种控制是输入的是开关量,而输出为脉冲量,应算是开环控制。因为,这里的开关量只是发送控制命令。命令发出后,即根据预定要求启动脉冲量输出程序,输出脉冲量。而输出的结果是不予反馈的。
脉冲量输出程序,有一个坐标(一个输出点)的,也有多个坐标(多个输出点)的。在多个坐标中,有坐标控制不相关的,也有相关的。后者要使两个坐标的运动协调的,以达到按一定轨迹运动。

















 xiexie谢谢
xiexie谢谢