【浅说模拟量控制】
模拟量是连续量,多数是非电量。而PLC只能处理数字量、电量。为此,一般讲:
要有传感器,以把模拟量转换成电量,如果这电量不是标准的,还需要有变送器、以把电量变换为标准的电信号,如4到20 毫安、1 到5伏、0 到 10 伏 等等;
要有模拟量(A)到数字量(D)转换的模拟量输入单元(模块),以把这些标准的电信号变换成数字信号;
要有数字量(D)到模拟量(A)转换的模拟量输出模块,以把PLC处理后的数字量变换成模拟量;
要有执行器,根据模拟量的大小执行相应的模拟输出控制动作。
当然,如同处理逻辑量一样,PLC的CPU、内存、相应的程序等也是必需的。只是这里多了以上提到的信号的采集、转换、变换及执行等环节。
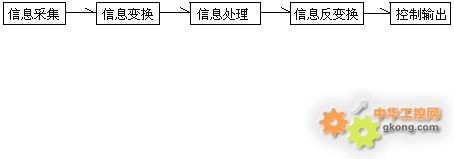
所以,一个完整的模拟量PLC控制,一般讲,其过程是:
用传感器采集信息,并把它变换成标准电信号,进而送给模拟量输入模块;
模拟量输入模块把标准电信号转换成CPU可处理的数字信息;
CPU按要求对此信息进行处理,产生相应的控制信息,并传送给模拟量输出模块;
模拟量输出模块得到控制信息后,经变换,再以标准信号的形式传给执行器;
执行器对此信号进行放大和变换,产生控制作用,施加到受控对象上。
要弄清的是,这里“基于信息采集和处理”的信息,可能是调节量,也可能是干扰量。
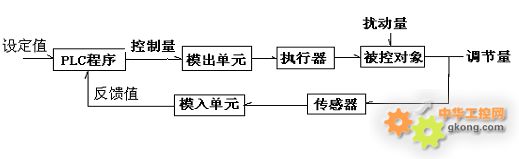
如为调节量,则要用反馈控制。它是一种模拟量最基本的控制方式。它依据系统的实际输出与预期输出间的偏差来进行控制,以期逐步缩小这一偏差。至于产生偏差的原因,它是不理睬的。
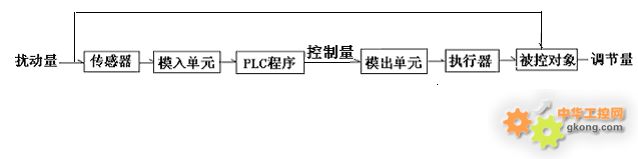
如信息为干扰量,也可用前馈控制。它基于扰动补偿原理,根据扰动的情况作相应控制。
从图知,它的传感器监测的是扰动量。PLC程序根据扰动量、控制量与调节量间的关系产生相应的控制量,进而再通过模拟量输出单元、执行器作用到被控对象上,其目的是在干扰量作用于系统的同时,这个控制量也作用于该系统,以补偿干扰对系统的不利影响。可知,这里的信息流是开路的,所以前馈控制又称开环控制。
开环控制使系统在偏差即将发生之前就注意纠正偏差,这是它的优点。但要弄清有多少扰动量,以及它与调节量间的关系,即控制量随扰动变化的规律,是不易的。这也是它用得不多的原因。
以上讨论的是完整的模拟量控制过程,是较复杂的。既有模入(AI),又有模拟出(AO)。有时,为了简单,可不用那么完整的模拟量控制。如有的只用模入,而输出用逻辑量(DO)。如控制电炉温度,简单的办法是,不停地读入温度值,并与设定值比较。如实际温度小于设定值,则控制一个逻辑量ON,用其使加热器得电。反之,如实际温度大于设定值,则控制这个逻辑量OFF,用其使加热器失电。再如,也可能不用模入,而用逻辑量入(DI),但用模拟量输出。再就是,由于脉冲技术的发展,模拟量控制也可运用有关脉冲控制技术。
[此贴子已经被作者于2009-12-11 14:17:40编辑过]