发表于:2013/9/13 8:53:50
#0楼
引用 征 的回复内容:
……电流环的输出是保证电流达到速度环要求的电流指令所需要的电压。……
--------------------------------------------------------------------------------
1、我们说双闭环中,速度环是主环,在速度偏差的输入下,速度调节器能有效地调节电压,从而调节电流、调节电磁转矩,使速度偏差迅速缩小直至为零;
2、但是当速度环,在速度偏差很大的情况下,举例说启动过程,速度调节器调节电压,电压会达到很大的值,调节电流会达到烧毁电机的程度,电机的速度也不会一下子升高到给定值,速度环失去对电压、电流、转矩的控制作用;
3、这时候,需要一个电流环,来控制这个大电流,限制这个电流,不要这个大电流达到烧毁电机的程度,又要这个电流始终保持允许最大状态,以保证这个加速过程尽可能的短,尽可能得快!
4、谁来控制这个“大电流”,当然是“电流闭环”啊!
5、你只要看看下图,电流环的输出电流值idm是恒定的水平直线,就知道是电流环控制了这个启动大电流为idm的;
![附件 360截图20130824191158890.jpg]()
6、也就是说,电流环输出的大电流idm,绝不是“保证电流达到速度环要求的电流指令所需要的电压。……”,因为这时候速度环要求的电流指令是很大很大的,而电流环输出的电流idm是电机允许的最大电流,如果检测输出的电流大于idm,检测反馈后电流调节器会限制电流不大于idm,如果检测输出的电流小于idm,检测反馈后电流调节器会调高电流不小于idm;
7、“征”说,“电流环的输出是保证电流达到速度环要求的电流指令所需要的电压。……”,是各错误的说法!
8、因为电流环输出的idm是设计者根据电机设计的,或者是用户输入的电机参数决定的,idm是电机允许的最大安全电流!怎么能是“速度环要求的电流指令”呢?
9、“征”绝对是个“假专家”,是个说谎骂人的“专家”!
。
引用 征 的回复内容:
…… 速度环的输出,即电流环的输入指令-------- 产生需要的力矩的电流值,是不断变化的, 跟克服速度偏差所需要的转矩有关。……
--------------------------------------------------------------------------------
1、我们说双闭环中,速度环是主环,在速度偏差的输入下,速度调节器能有效地调节电压,从而调节电流、调节电磁转矩,使速度偏差迅速缩小直至为零;
2、但是当速度环,在速度偏差很大的情况下,举例说启动过程,速度调节器调节电压,电压会达到很大的值,调节电流会达到烧毁电机的程度,电机的速度也不会一下子升高到给定值,速度环失去对电压、电流、转矩的控制作用;
3、这时候,需要一个电流环,来控制这个大电流,限制这个电流,不要这个大电流达到烧毁电机的程度,又要这个电流始终保持允许最大状态,以保证这个加速过程尽可能的短,尽可能得快!
4、征“说”,“速度环的输出,即电流环的输入指令-------- 产生需要的力矩的电流值,是不断变化的, 跟克服速度偏差所需要的转矩有关。……”,是对速度环的“不信任”,是对“闭环控制”理论的错误理解,是犯了专业错误,是非专业的一种“想象”!“空想”!
5、这就是“征”的错误,也是很多人的错误,错误地认为“速度外环”需要的“电流”由“电流内环”来控制!
6、正确的是,速度外环控制不了的大电流,由电流内环来控制,速度外环能控制的电流,由速度环自己去完成!
7、如果“速度外环”与“电流内环”一起共同工作,就是犯了控制逻辑上的错误,因为它两个环的调节方向是相反的,举例说:
1)负载增大时,速度减小,电流增大;
2)速度环检测速度反馈后,要调高电压;
3)电流环检测电流反馈后,要调低电压;
8、不知“征”的这个笑话还要讲到什么时候???
9、我们看看下图:
1)电机启动时,速度环检测速度为零,调节器调高电压,可控硅导通角为180°,饱和;
2)电机启动时,电流环检测电流为大电流,调节器调低电压,可控硅导通角离开180°,进入电流可控状态;
3)如果没有电流内环,速度环会把电压调高到,电机电流达到idm的几十倍;
4)有了电流环,检测反馈大电流,电流环调低电压,是电流恒定在idm上;
10、我们看到了启动时:
1)“速度环”检测速度调高电压,可控硅导通角为180°,失控;
2)而“电流环”检测到大电流,调低电压,可控硅导通角离开180°,进入可控的电流闭环控制过程;
3)速度环与电流环的调节方向相反,同时工作会犯逻辑控制上的错误;
11、我想大家都明白了,只有自命为专家的“征”还会继续他的笑话!
12、“征”原来是个“伪专家”,骂人专家!
![附件 360截图20130824191158890.jpg]()
……电流环的输出是保证电流达到速度环要求的电流指令所需要的电压。……
--------------------------------------------------------------------------------
1、我们说双闭环中,速度环是主环,在速度偏差的输入下,速度调节器能有效地调节电压,从而调节电流、调节电磁转矩,使速度偏差迅速缩小直至为零;
2、但是当速度环,在速度偏差很大的情况下,举例说启动过程,速度调节器调节电压,电压会达到很大的值,调节电流会达到烧毁电机的程度,电机的速度也不会一下子升高到给定值,速度环失去对电压、电流、转矩的控制作用;
3、这时候,需要一个电流环,来控制这个大电流,限制这个电流,不要这个大电流达到烧毁电机的程度,又要这个电流始终保持允许最大状态,以保证这个加速过程尽可能的短,尽可能得快!
4、谁来控制这个“大电流”,当然是“电流闭环”啊!
5、你只要看看下图,电流环的输出电流值idm是恒定的水平直线,就知道是电流环控制了这个启动大电流为idm的;
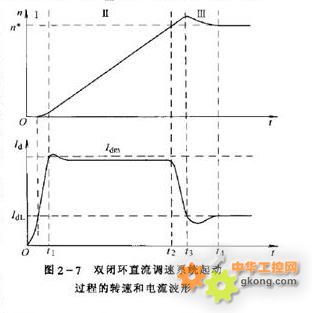
6、也就是说,电流环输出的大电流idm,绝不是“保证电流达到速度环要求的电流指令所需要的电压。……”,因为这时候速度环要求的电流指令是很大很大的,而电流环输出的电流idm是电机允许的最大电流,如果检测输出的电流大于idm,检测反馈后电流调节器会限制电流不大于idm,如果检测输出的电流小于idm,检测反馈后电流调节器会调高电流不小于idm;
7、“征”说,“电流环的输出是保证电流达到速度环要求的电流指令所需要的电压。……”,是各错误的说法!
8、因为电流环输出的idm是设计者根据电机设计的,或者是用户输入的电机参数决定的,idm是电机允许的最大安全电流!怎么能是“速度环要求的电流指令”呢?
9、“征”绝对是个“假专家”,是个说谎骂人的“专家”!
。
引用 征 的回复内容:
…… 速度环的输出,即电流环的输入指令-------- 产生需要的力矩的电流值,是不断变化的, 跟克服速度偏差所需要的转矩有关。……
--------------------------------------------------------------------------------
1、我们说双闭环中,速度环是主环,在速度偏差的输入下,速度调节器能有效地调节电压,从而调节电流、调节电磁转矩,使速度偏差迅速缩小直至为零;
2、但是当速度环,在速度偏差很大的情况下,举例说启动过程,速度调节器调节电压,电压会达到很大的值,调节电流会达到烧毁电机的程度,电机的速度也不会一下子升高到给定值,速度环失去对电压、电流、转矩的控制作用;
3、这时候,需要一个电流环,来控制这个大电流,限制这个电流,不要这个大电流达到烧毁电机的程度,又要这个电流始终保持允许最大状态,以保证这个加速过程尽可能的短,尽可能得快!
4、征“说”,“速度环的输出,即电流环的输入指令-------- 产生需要的力矩的电流值,是不断变化的, 跟克服速度偏差所需要的转矩有关。……”,是对速度环的“不信任”,是对“闭环控制”理论的错误理解,是犯了专业错误,是非专业的一种“想象”!“空想”!
5、这就是“征”的错误,也是很多人的错误,错误地认为“速度外环”需要的“电流”由“电流内环”来控制!
6、正确的是,速度外环控制不了的大电流,由电流内环来控制,速度外环能控制的电流,由速度环自己去完成!
7、如果“速度外环”与“电流内环”一起共同工作,就是犯了控制逻辑上的错误,因为它两个环的调节方向是相反的,举例说:
1)负载增大时,速度减小,电流增大;
2)速度环检测速度反馈后,要调高电压;
3)电流环检测电流反馈后,要调低电压;
8、不知“征”的这个笑话还要讲到什么时候???
9、我们看看下图:
1)电机启动时,速度环检测速度为零,调节器调高电压,可控硅导通角为180°,饱和;
2)电机启动时,电流环检测电流为大电流,调节器调低电压,可控硅导通角离开180°,进入电流可控状态;
3)如果没有电流内环,速度环会把电压调高到,电机电流达到idm的几十倍;
4)有了电流环,检测反馈大电流,电流环调低电压,是电流恒定在idm上;
10、我们看到了启动时:
1)“速度环”检测速度调高电压,可控硅导通角为180°,失控;
2)而“电流环”检测到大电流,调低电压,可控硅导通角离开180°,进入可控的电流闭环控制过程;
3)速度环与电流环的调节方向相反,同时工作会犯逻辑控制上的错误;
11、我想大家都明白了,只有自命为专家的“征”还会继续他的笑话!
12、“征”原来是个“伪专家”,骂人专家!