发表于:2012/8/27 22:10:17
#30楼
老劉 不是我睜眼說瞎話 實在是你的程度太低了 連下面這句話 你都看不懂 我勸你 這不是你該來的
電機所移動的步距=PLC發出命令所要移動的步距 這就是靠脈衝當量 來讓雙方能夠對應起來
-------------------------
現今高解析度之伺服多用通訊傳輸 更無頻寬的問題 只有用增量才會有頻寬問題 但此問題也僅限在驅動器
顯然這句話你也沒搞懂
我真的想罵你老娘
你告訴我哪個講的 --------如果:编码器反馈脉冲的频率 = PLC发的额定脉冲频率×10 ;
编码器反馈脉冲的频率 = PLC发的额定脉冲频率
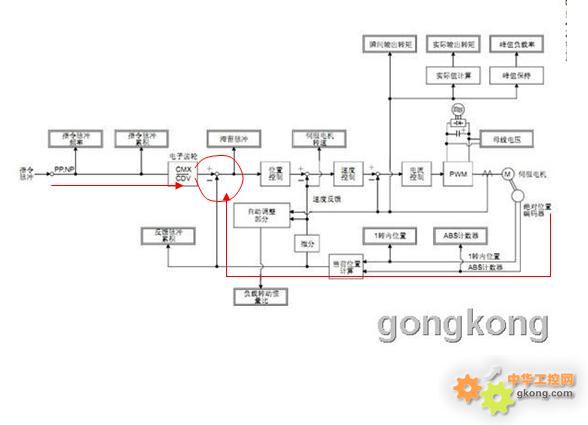
一直告訴你 電子齒輪是驅動器內部的參數 關PLC什麼屁事
17位高解析度之伺服 其解析度(分辨率)怎來
伺服電機背後之編碼器 為256線之類弦波 就8位
4倍頻 2位
驅動器內存模擬量(可做128倍頻) 8 位
在扣掉1位的震盪 剛好17位
所以你這 编码器反馈脉冲的频率 是已經過電子齒輪比的"脈衝數" 哪來的"如果"
PLC是開環 他只負責送脈衝 至於伺服是否有走到定位 PLC是不管的
但在運動控制上 若是速度型的控制 那驅動器會模擬編碼器的訊號給軸控卡形成閉環 那驅動器輸出的頻寬小於軸控卡 encoder feedback 的頻寬 伺服電機的速度 跟解析度的乘積就會受限在這頻寬內
電機所移動的步距=PLC發出命令所要移動的步距 這就是靠脈衝當量 來讓雙方能夠對應起來
-------------------------
現今高解析度之伺服多用通訊傳輸 更無頻寬的問題 只有用增量才會有頻寬問題 但此問題也僅限在驅動器
顯然這句話你也沒搞懂
我真的想罵你老娘
你告訴我哪個講的 --------如果:编码器反馈脉冲的频率 = PLC发的额定脉冲频率×10 ;
编码器反馈脉冲的频率 = PLC发的额定脉冲频率
一直告訴你 電子齒輪是驅動器內部的參數 關PLC什麼屁事
17位高解析度之伺服 其解析度(分辨率)怎來
伺服電機背後之編碼器 為256線之類弦波 就8位
4倍頻 2位
驅動器內存模擬量(可做128倍頻) 8 位
在扣掉1位的震盪 剛好17位
所以你這 编码器反馈脉冲的频率 是已經過電子齒輪比的"脈衝數" 哪來的"如果"
PLC是開環 他只負責送脈衝 至於伺服是否有走到定位 PLC是不管的
但在運動控制上 若是速度型的控制 那驅動器會模擬編碼器的訊號給軸控卡形成閉環 那驅動器輸出的頻寬小於軸控卡 encoder feedback 的頻寬 伺服電機的速度 跟解析度的乘積就會受限在這頻寬內
[此贴子已经被作者于2024/10/23 13:54:45编辑过]
高速 高精 高頻抗干擾
做產品不難 但要讓產品穩定 好難 好難
做產品不難 但要讓產品穩定 好難 好難