发表于:2013/8/16 23:18:41
#0楼
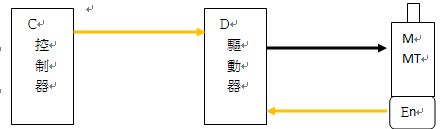
位置環與速度環其實都是運動控制的兩種控制模式 其控制的結果就是"定位"
在早期的伺服驅動有分為 位置型(日系)與速度型(歐系)的驅動器 當然其上位控制器也分為兩種
大約10多年前 日系將兩種控制模式合併 提供上位控制器做為選用所要的模式 至今所有通用伺服也都是延續此模式 但運動控制仍然壁壘分明
位置環在確認編碼器回授位置確認 速度環修正位置偏差(這是動態的偵測修正)
問題一 為何運動控制其位置環及速度環仍壁壘分明
問題二 位置還大家望文興義就知跟定位有關 但速度環怎麼也跟定位有關 究竟速度環是甚麼樣的環?
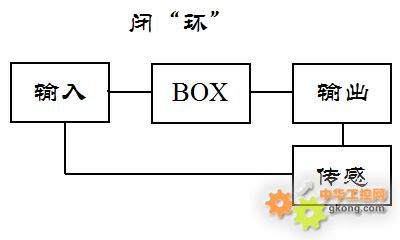
問題三 環的定義是什麼?
希望透過此文 能讓大家知道 什麼是運動控制 什麼是PLC 什麼是伺服
在早期的伺服驅動有分為 位置型(日系)與速度型(歐系)的驅動器 當然其上位控制器也分為兩種
大約10多年前 日系將兩種控制模式合併 提供上位控制器做為選用所要的模式 至今所有通用伺服也都是延續此模式 但運動控制仍然壁壘分明
位置環在確認編碼器回授位置確認 速度環修正位置偏差(這是動態的偵測修正)
問題一 為何運動控制其位置環及速度環仍壁壘分明
問題二 位置還大家望文興義就知跟定位有關 但速度環怎麼也跟定位有關 究竟速度環是甚麼樣的環?
問題三 環的定義是什麼?
希望透過此文 能讓大家知道 什麼是運動控制 什麼是PLC 什麼是伺服
高速 高精 高頻抗干擾
做產品不難 但要讓產品穩定 好難 好難
做產品不難 但要讓產品穩定 好難 好難