














发表于:2013/8/25 15:51:48
#10楼
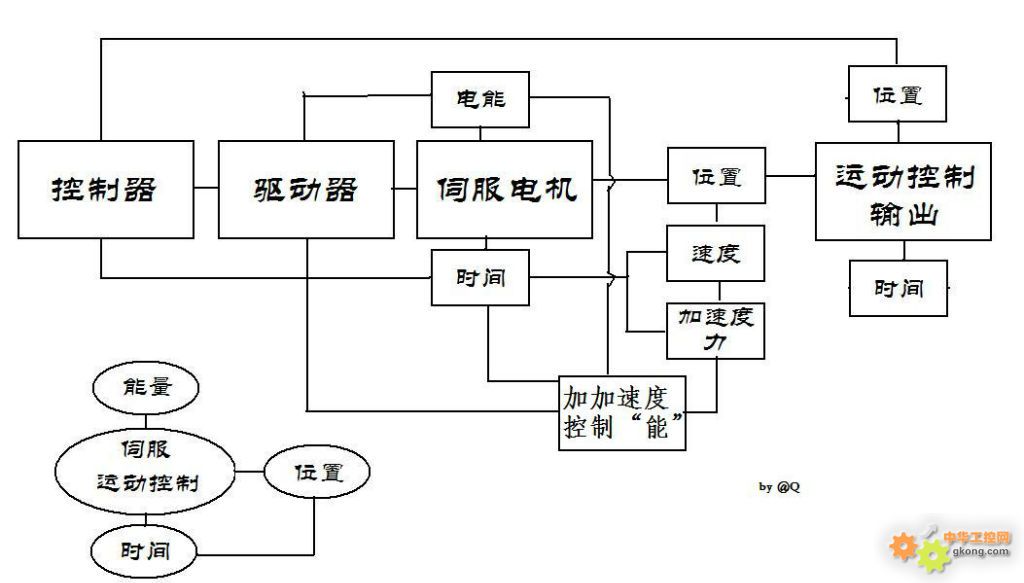
伺服控制简图(我自己画的,不保证对错,最后有特别声明)![附件 伺服控制简图.jpg]()
四, 控制的内环--伺服电机控制重要的是时间与能量,控制的外环—运动控制输出重要的是时间与位置。伺服电机也有位置要求—电机换相,其事实仍然主要是为“能量环”服务的。而伺服电机的“位置环”是否就是直接对应控制外环的“位置环”?不全是,其中有可能有机械传动的精度(位置)与响应(时间)的偏差。
五, 控制的内环以“速度环”优先,在于始终合并微小位置环与微小时间环的同步随动监控,控制精度高,难度 大,但如控制精度及响应达不到要求,会出现“振荡”。控制的内环以位置环优先,在于时间环不用切割的很小,对于输出的精度(位置)及响应(时间)宽容度较大,较易控制。
六, 轨迹法----伺服控制的“量子化”理论,基于量子力学的最小单位电子的“时间与位置”实际上是运动轨迹形成的一个电子云,时间与空间不可同时确定性。伺服控制理论中,当时间与位置的微小分割到接近到实际的电子器件、机械器件、及反馈器件的精度及响应,它也就相似于分割到了“电子”级别,也就一样要遵守时间与位置不可同时确定的“量子化”理论,轨迹法就是在控制中,如果时间是确定的,位置不可确定,而是在一个范围内,如果位置必须确定,则时间(响应)不可确定。所以,“速度环”“位置环”哪个优先都是如何理解这个轨迹法,其还取决于实际的电子器件、机械器件、及反馈器件的精度及响应的保证。
!!!!!!
七, 特别声明:为防止被误当作“大师”,误导初学者,本人特别声明从没有玩过一台伺服,从没有完整看过一本伺服教材书籍,对于以上所写的文字及示意图内容,纯属本人以物理学对于伺服控制的学习心得,没有从哪个理论书籍与实践经验的“出处”来头,看者就当我是一个学习伺服的白丁,不用再告诫我回家多看看几本伺服和数控机床的教材书。我还没准备做伺服用伺服,纯粹玩票的。在此全当响应一下蔡先生的热情,后续不再回复本贴。
四, 控制的内环--伺服电机控制重要的是时间与能量,控制的外环—运动控制输出重要的是时间与位置。伺服电机也有位置要求—电机换相,其事实仍然主要是为“能量环”服务的。而伺服电机的“位置环”是否就是直接对应控制外环的“位置环”?不全是,其中有可能有机械传动的精度(位置)与响应(时间)的偏差。
五, 控制的内环以“速度环”优先,在于始终合并微小位置环与微小时间环的同步随动监控,控制精度高,难度 大,但如控制精度及响应达不到要求,会出现“振荡”。控制的内环以位置环优先,在于时间环不用切割的很小,对于输出的精度(位置)及响应(时间)宽容度较大,较易控制。
六, 轨迹法----伺服控制的“量子化”理论,基于量子力学的最小单位电子的“时间与位置”实际上是运动轨迹形成的一个电子云,时间与空间不可同时确定性。伺服控制理论中,当时间与位置的微小分割到接近到实际的电子器件、机械器件、及反馈器件的精度及响应,它也就相似于分割到了“电子”级别,也就一样要遵守时间与位置不可同时确定的“量子化”理论,轨迹法就是在控制中,如果时间是确定的,位置不可确定,而是在一个范围内,如果位置必须确定,则时间(响应)不可确定。所以,“速度环”“位置环”哪个优先都是如何理解这个轨迹法,其还取决于实际的电子器件、机械器件、及反馈器件的精度及响应的保证。
!!!!!!
七, 特别声明:为防止被误当作“大师”,误导初学者,本人特别声明从没有玩过一台伺服,从没有完整看过一本伺服教材书籍,对于以上所写的文字及示意图内容,纯属本人以物理学对于伺服控制的学习心得,没有从哪个理论书籍与实践经验的“出处”来头,看者就当我是一个学习伺服的白丁,不用再告诫我回家多看看几本伺服和数控机床的教材书。我还没准备做伺服用伺服,纯粹玩票的。在此全当响应一下蔡先生的热情,后续不再回复本贴。


