













发表于:2022/5/14 23:30:31
#0楼
厂里最近在开发小型的包装机,这几天刚开始调试,发现有个轴不知道是编程问题还是机构的问题,会有规律的偏移,机构的师傅又请了长假,所以求助一下各位老哥
下面是具体问题
这个轴是横移的(两点之间往复运动),原点一个传感器,终点一个传感器,最开始是普通步进电机,发现每运动不到100次,会偏移
具体体现就是每次回原点位置会多回一点点,渐渐地会碰不到终点的传感器,最开始毫无疑问的怀疑步进电机问题,换了一个闭环步进(小机器受成本限制不好上伺服),扭矩还多2NM,想着应该没问题了,换上以后发现还是有偏移现象,只不过是每隔200次左右会偏移到之前100次的程度,程序上找了半天没找出问题,下面是程序
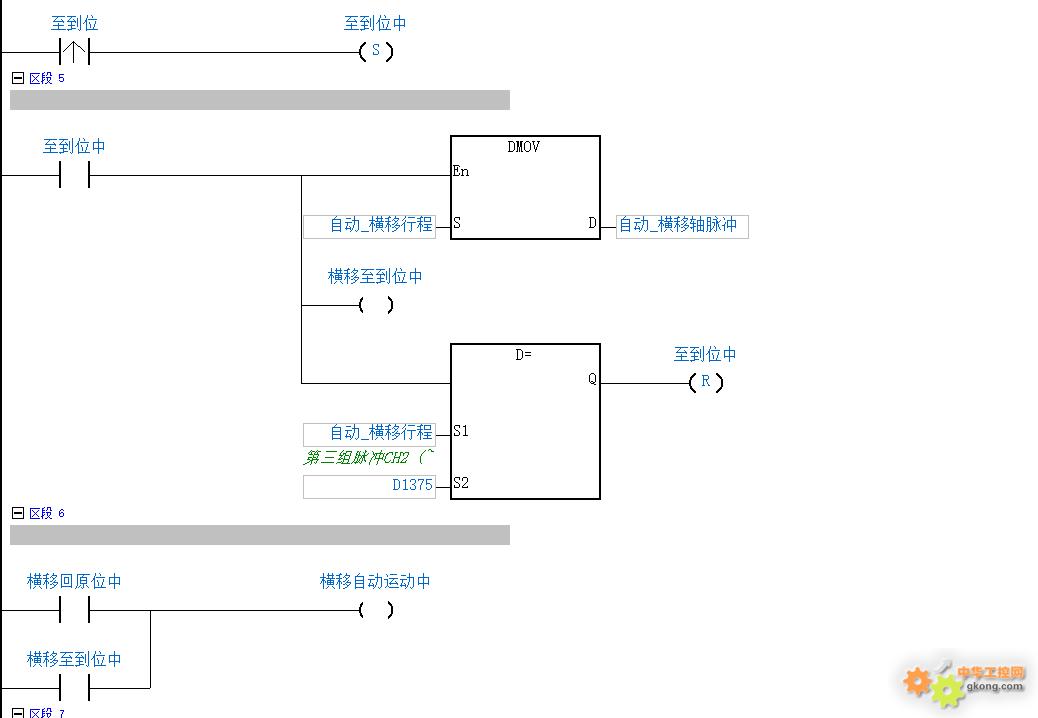
这是功能块
![附件 功能块.jpg]()
这个是功能块引脚
![附件 引脚.jpg]()
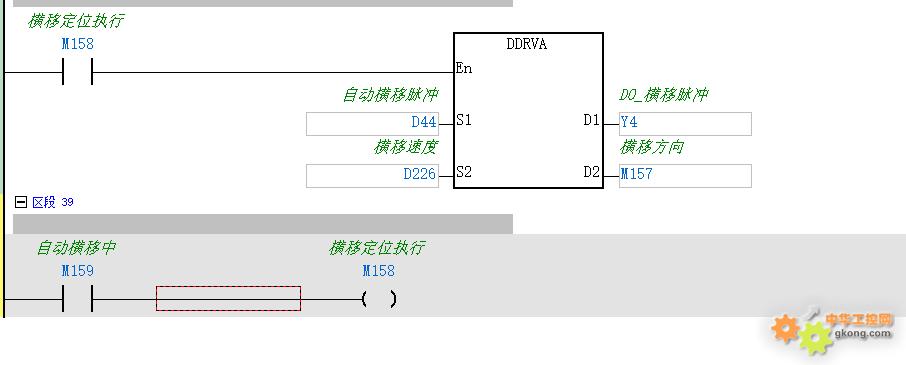
这个是定位指令
![附件 映射.jpg]()
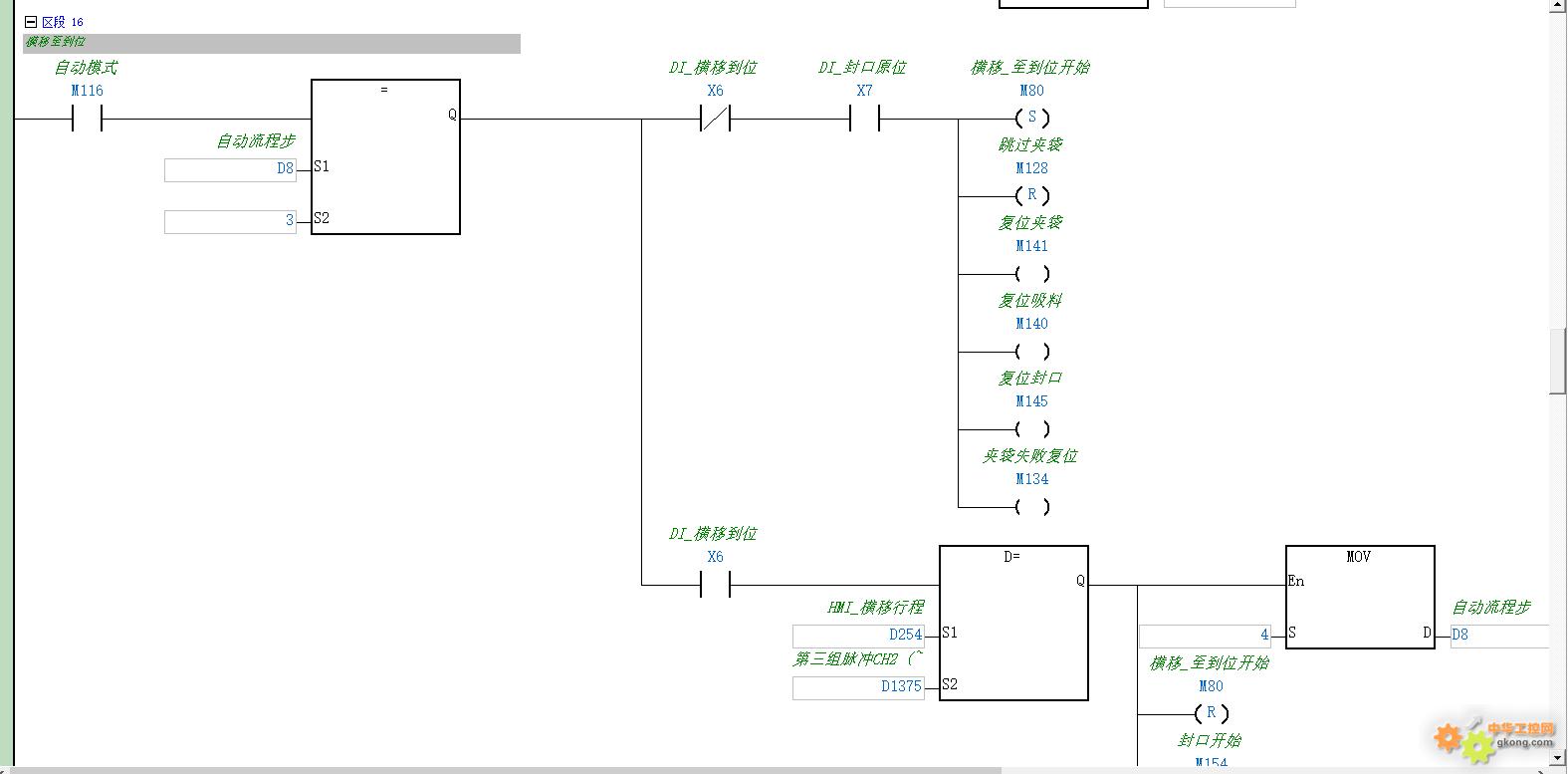
这个是自动程序
![附件 自动程序.jpg]()
脉冲输出寄存器也是监视过,也确定没问题,都是到了0或者终点的脉冲数
而且程序里面也是用的比较指令,到达脉冲数才会下一步,按理说程序应该没啥问题吧
每次定位偏移的时候,我去后面看,同步带都是上面松,下面紧,断开电机使能用手转几圈,上下松紧就一致了,跟这个有关系吗?按说不跳齿就不会影响定位吧?对这个不是很懂,下面是视频,大家帮忙看一下有没问题
下面是具体问题
这个轴是横移的(两点之间往复运动),原点一个传感器,终点一个传感器,最开始是普通步进电机,发现每运动不到100次,会偏移
具体体现就是每次回原点位置会多回一点点,渐渐地会碰不到终点的传感器,最开始毫无疑问的怀疑步进电机问题,换了一个闭环步进(小机器受成本限制不好上伺服),扭矩还多2NM,想着应该没问题了,换上以后发现还是有偏移现象,只不过是每隔200次左右会偏移到之前100次的程度,程序上找了半天没找出问题,下面是程序
这是功能块
这个是功能块引脚

这个是定位指令
这个是自动程序
脉冲输出寄存器也是监视过,也确定没问题,都是到了0或者终点的脉冲数
而且程序里面也是用的比较指令,到达脉冲数才会下一步,按理说程序应该没啥问题吧
每次定位偏移的时候,我去后面看,同步带都是上面松,下面紧,断开电机使能用手转几圈,上下松紧就一致了,跟这个有关系吗?按说不跳齿就不会影响定位吧?对这个不是很懂,下面是视频,大家帮忙看一下有没问题




