














发表于:2025/9/16 17:32:54
#0楼
1.关节轴与虚拟轴
1)关节轴
关节轴是指实际机械结构中的旋转关节,在程序中一般显示旋转角度。由于电机与旋转关节会存在减速比,所以设置units时要按照实际关节旋转一圈来设,同时table中填写结构参数时也要按照旋转关节中心计算,而不是按照电机轴中心计算。
2)虚拟轴
虚拟轴不是实际存在的,抽象为世界坐标系的6个自由度,依次为X、Y、Z、RX、RY、RZ。可以理解为空间直角坐标系的三个直线轴和绕轴的三个旋转轴,用来确定机械手末端工作点的加工轨迹与坐标。
2.坐标系
1)关节坐标系
每个轴相对原点位置的绝对角度,包含机械手所有关节,各关节之间相互独立,坐标单位为角度。操作其中一个关节时不影响其他关节。
2)直角坐标系
世界坐标系:世界坐标系是被固定在空间上的标准直角坐标系,以机械手的底盘为坐标原点,其位置根据机械手类型确定。虚拟轴操作时就是根据世界坐标系运动,此时各关节会自动解算需要旋转的角度。
用户坐标系:用户对每个作业空间进行定义的直角坐标系,它用于位置寄存器的示教与执行,位置补偿命令的执行等,在没有定义的时候,将由世界坐标系来代替该坐标系。
机械手算法的主要目的是将关节坐标系与直角坐标系建立联系。
坐标系转换是指在描述同一个空间时,由原来的坐标系转换为另一个坐标系。机械手使用中,常用于确定工件坐标系。
工件坐标系是固定于工件上的笛卡尔坐标系,工件在坐标系相对于世界坐标系存在转换。每个机械手可以拥有诺干工件坐标系,用来表示不同的工件,或者表示同一工件在不同的位置。
虚拟轴满足XYZ三轴的机械手类型支持此功能。
3.姿态
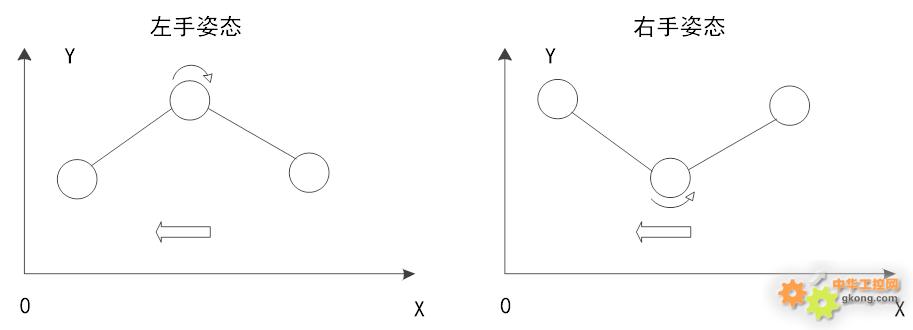
机械手姿态在数学上来说,是同一组虚拟轴数值有多组关节轴的解。即机械手在笛卡尔坐标系中运动到某一坐标点,可以有多种运动轨迹,这些运动轨迹就对应着不同姿态,如下图SCARA的两种姿态,在X方向运动,关节轴可以有两种运动方式。
![附件 1.jpg]()
4.奇异点
逆解模式下,机械手运动到某一特定位置时,会失去某个自由度,该位置就叫做奇异点,实际使用过程中应避免运动到奇异点。例如当SCARA机械手完全伸直时,此时无法在X方向平动,需要操作往X负方向运动时,结构无法判断使用哪种姿态运动,此时机械手臂无法运动,出现此状况时,先使用正解模式调整关节轴位置,之后再切换到逆解模式使用。
1)关节轴
关节轴是指实际机械结构中的旋转关节,在程序中一般显示旋转角度。由于电机与旋转关节会存在减速比,所以设置units时要按照实际关节旋转一圈来设,同时table中填写结构参数时也要按照旋转关节中心计算,而不是按照电机轴中心计算。
2)虚拟轴
虚拟轴不是实际存在的,抽象为世界坐标系的6个自由度,依次为X、Y、Z、RX、RY、RZ。可以理解为空间直角坐标系的三个直线轴和绕轴的三个旋转轴,用来确定机械手末端工作点的加工轨迹与坐标。
2.坐标系
1)关节坐标系
每个轴相对原点位置的绝对角度,包含机械手所有关节,各关节之间相互独立,坐标单位为角度。操作其中一个关节时不影响其他关节。
2)直角坐标系
世界坐标系:世界坐标系是被固定在空间上的标准直角坐标系,以机械手的底盘为坐标原点,其位置根据机械手类型确定。虚拟轴操作时就是根据世界坐标系运动,此时各关节会自动解算需要旋转的角度。
用户坐标系:用户对每个作业空间进行定义的直角坐标系,它用于位置寄存器的示教与执行,位置补偿命令的执行等,在没有定义的时候,将由世界坐标系来代替该坐标系。
机械手算法的主要目的是将关节坐标系与直角坐标系建立联系。
坐标系转换是指在描述同一个空间时,由原来的坐标系转换为另一个坐标系。机械手使用中,常用于确定工件坐标系。
工件坐标系是固定于工件上的笛卡尔坐标系,工件在坐标系相对于世界坐标系存在转换。每个机械手可以拥有诺干工件坐标系,用来表示不同的工件,或者表示同一工件在不同的位置。
虚拟轴满足XYZ三轴的机械手类型支持此功能。
3.姿态
机械手姿态在数学上来说,是同一组虚拟轴数值有多组关节轴的解。即机械手在笛卡尔坐标系中运动到某一坐标点,可以有多种运动轨迹,这些运动轨迹就对应着不同姿态,如下图SCARA的两种姿态,在X方向运动,关节轴可以有两种运动方式。
4.奇异点
逆解模式下,机械手运动到某一特定位置时,会失去某个自由度,该位置就叫做奇异点,实际使用过程中应避免运动到奇异点。例如当SCARA机械手完全伸直时,此时无法在X方向平动,需要操作往X负方向运动时,结构无法判断使用哪种姿态运动,此时机械手臂无法运动,出现此状况时,先使用正解模式调整关节轴位置,之后再切换到逆解模式使用。