














发表于:2025/8/1 16:43:36
#0楼
插补是机床数控系统依照一定方法确定刀具运动轨迹的过程,插补是一个实时进行的数据密化的过程,不论是何种插补算法,运算原理基本相同,其作用都是根据给定的信息进行数字计算,不断计算出参与运动的各坐标轴的进给指令,然后分别驱动各自相应的执行部件产生协调运动,以使被控机械部件按理想的路线与速度移动。
插补最常见的两种方式是直线插补和圆弧插补。插补运动至少需要两个轴参与,进行插补运动时,首先需要建立坐标系,将规划轴映射到相应的坐标系中,运动控制器根据坐标映射关系,控制各轴运动,实现要求的运动轨迹。
插补运动指令会存入运动缓冲区,再依次从运动缓冲区中取出指令执行,直到插补运动全部执行完。
1.直线插补原理
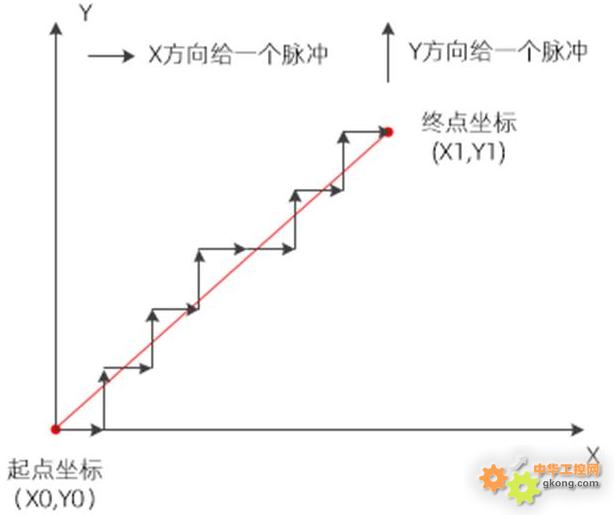
直线插补方式中,两点间的插补沿着直线的点群来逼近。首先假设在实际轮廓起始点处沿X方向走一小段(给一个脉冲当量轴走一段固定距离),发现终点在实际轮廓的下方,则下一条线段沿Y方向走一小段,此时如果线段终点还在实际轮廓下方,则继续沿Y方向走一小段,直到在实际轮廓上方以后,再向X方向走一小段,依次循环类推,直到到达轮廓终点为止。这样实际轮廓是由一段段的折线拼接而成,虽然是折线,但每一段插补线段在精度允许范围内非常小,那么此段折线还是可以近似看做一条直线段,这就是直线插补。
正运动控制器采用硬件插补,插补精度在一个脉冲内,所以轨迹放大依然平滑。
假设轴需要在在XY平面上从点(X0,Y0)运动到点(X1,Y1),其直线插补的加工过程如下图所示。
![附件 直线插补原理.jpg]()
2.圆弧插补原理
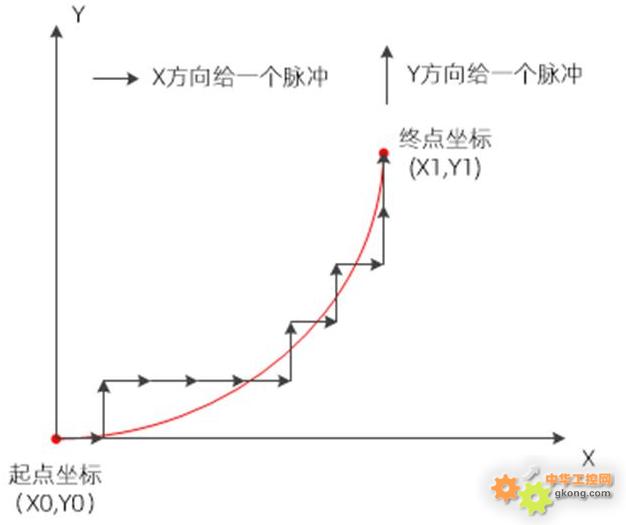
圆弧插补与直线插补类似,给出两端点间的插补数字信息,以一定的算法计算出逼近实际圆弧的点群,控制轴沿这些点运动,加工出圆弧曲线。圆弧插补可以是平面圆弧(至少两个轴),还可以是空间圆弧(至少三个轴)。假设轴需要在XY平面第一象限走一段逆圆弧,圆心为起点,其圆弧插补的加工过程如下图所示。
控制器的空间圆弧插补功能是根据当前点和圆弧指令参数设置的终点和中间点(或圆心),由三个点确定圆弧,并实现空间圆弧插补运动,坐标为三维坐标,至少需要三个轴分别沿X轴、Y轴和Z轴运动。
![附件 圆弧插补原理.jpg]()
3.二轴直线插补
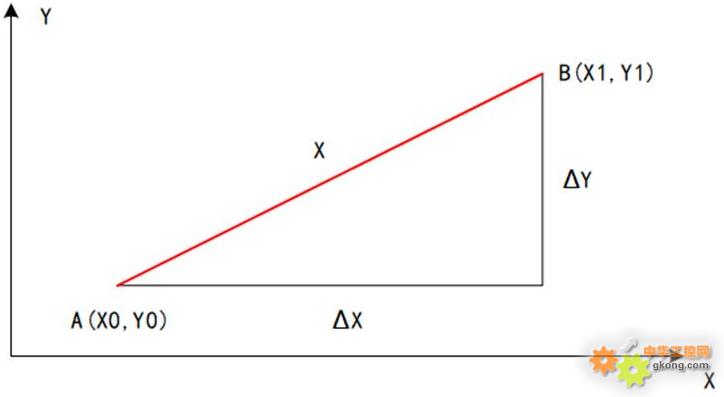
轴0和轴1两轴参与直线插补运动,如下图,2轴直线插补运动从A点运动到B点,XY轴同时启动,并同时到达终点,设置轴0的运动距离为?X,轴1的运动距离为?Y,主轴是BASE的第一个轴(此时主轴为轴0),插补主轴运动速度为S(主轴的设置速度),各个轴的实际速度为主轴的分速度,不等于S,此时:
插补合成运动距离:X=[(?X)2+(?Y)2]?
轴0实际速度:S0=S×?X/X
轴1实际速度:S1=S×?Y/X
![附件 二轴直线插补.jpg]()
4.三轴直线插补
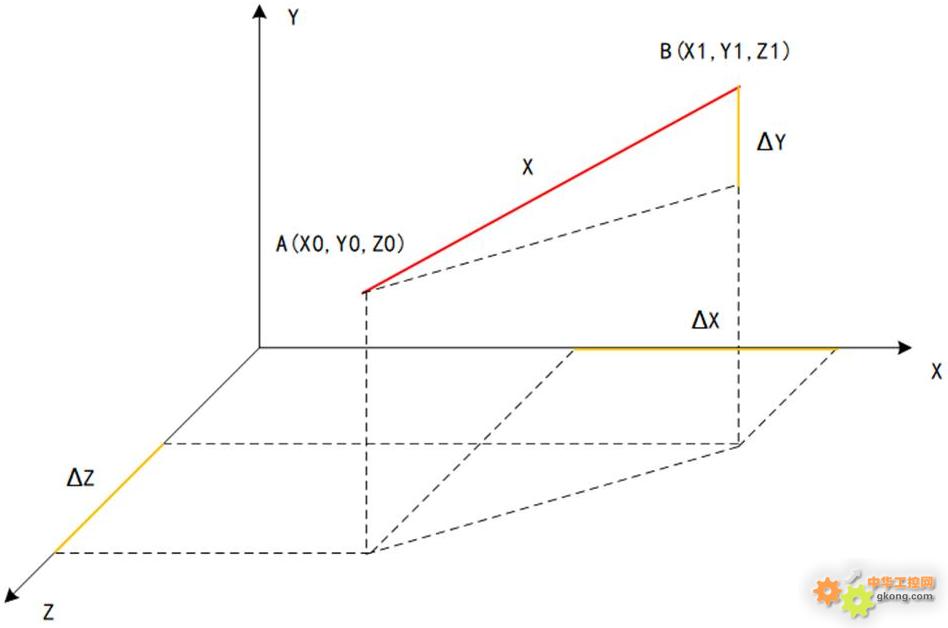
轴0、轴1和轴2三轴参与直线插补运动,如下图,3轴直线插补运动从A点运动到B点,XYZ轴同时启动,并同时到达终点,设置轴0的运动距离为?X,轴1的运动距离为?Y,轴2的运动距离为?Z,插补主轴轴0的运动速度为S,各个轴的实际速度为主轴的分速度,不等于S,此时:
插补合成运动距离为X=[(?X)2+(?Y)2+(?Z)2]?
轴0实际速度:S0=S×?X/X
轴1实际速度:S1=S×?Y/X
轴2实际速度:S1=S×?Z/X
![附件 三轴直线插补.jpg]()
5.多轴直线插补
多轴直线插补可以理解为轴的多个自由度,是在三维空间里的直线插补。以四轴插补为例,一般是三个轴在XYZ平面走直线,另一个轴为旋转轴,按照一定的比例关系做跟随运动。
插补最常见的两种方式是直线插补和圆弧插补。插补运动至少需要两个轴参与,进行插补运动时,首先需要建立坐标系,将规划轴映射到相应的坐标系中,运动控制器根据坐标映射关系,控制各轴运动,实现要求的运动轨迹。
插补运动指令会存入运动缓冲区,再依次从运动缓冲区中取出指令执行,直到插补运动全部执行完。
1.直线插补原理
直线插补方式中,两点间的插补沿着直线的点群来逼近。首先假设在实际轮廓起始点处沿X方向走一小段(给一个脉冲当量轴走一段固定距离),发现终点在实际轮廓的下方,则下一条线段沿Y方向走一小段,此时如果线段终点还在实际轮廓下方,则继续沿Y方向走一小段,直到在实际轮廓上方以后,再向X方向走一小段,依次循环类推,直到到达轮廓终点为止。这样实际轮廓是由一段段的折线拼接而成,虽然是折线,但每一段插补线段在精度允许范围内非常小,那么此段折线还是可以近似看做一条直线段,这就是直线插补。
正运动控制器采用硬件插补,插补精度在一个脉冲内,所以轨迹放大依然平滑。
假设轴需要在在XY平面上从点(X0,Y0)运动到点(X1,Y1),其直线插补的加工过程如下图所示。
2.圆弧插补原理
圆弧插补与直线插补类似,给出两端点间的插补数字信息,以一定的算法计算出逼近实际圆弧的点群,控制轴沿这些点运动,加工出圆弧曲线。圆弧插补可以是平面圆弧(至少两个轴),还可以是空间圆弧(至少三个轴)。假设轴需要在XY平面第一象限走一段逆圆弧,圆心为起点,其圆弧插补的加工过程如下图所示。
控制器的空间圆弧插补功能是根据当前点和圆弧指令参数设置的终点和中间点(或圆心),由三个点确定圆弧,并实现空间圆弧插补运动,坐标为三维坐标,至少需要三个轴分别沿X轴、Y轴和Z轴运动。
3.二轴直线插补
轴0和轴1两轴参与直线插补运动,如下图,2轴直线插补运动从A点运动到B点,XY轴同时启动,并同时到达终点,设置轴0的运动距离为?X,轴1的运动距离为?Y,主轴是BASE的第一个轴(此时主轴为轴0),插补主轴运动速度为S(主轴的设置速度),各个轴的实际速度为主轴的分速度,不等于S,此时:
插补合成运动距离:X=[(?X)2+(?Y)2]?
轴0实际速度:S0=S×?X/X
轴1实际速度:S1=S×?Y/X
4.三轴直线插补
轴0、轴1和轴2三轴参与直线插补运动,如下图,3轴直线插补运动从A点运动到B点,XYZ轴同时启动,并同时到达终点,设置轴0的运动距离为?X,轴1的运动距离为?Y,轴2的运动距离为?Z,插补主轴轴0的运动速度为S,各个轴的实际速度为主轴的分速度,不等于S,此时:
插补合成运动距离为X=[(?X)2+(?Y)2+(?Z)2]?
轴0实际速度:S0=S×?X/X
轴1实际速度:S1=S×?Y/X
轴2实际速度:S1=S×?Z/X
5.多轴直线插补
多轴直线插补可以理解为轴的多个自由度,是在三维空间里的直线插补。以四轴插补为例,一般是三个轴在XYZ平面走直线,另一个轴为旋转轴,按照一定的比例关系做跟随运动。
[此贴子已经被作者于2025/8/1 16:43:58编辑过]