














发表于:2025/6/16 16:51:07
#0楼
市场应用背景
随着精益柔性生产对速度与稳定性要求的不断提升,市场对运动控制系统的实时性与稳定性也提出了更高标准。
作为现代先进装备的核心大脑,高性能运动控制以其高精度、高速度、实时响应和高灵活性的精细化特性,驱动高端智能装备,实现精益生产与柔性制造。
常见传统方案:
传统运动控制方案主要有两种:PC+运动控制卡方案和PLC方案。
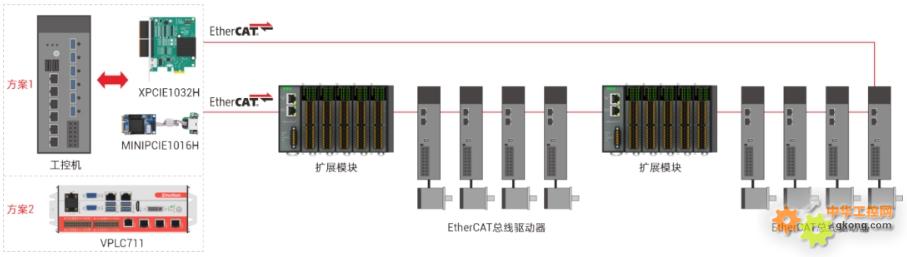
方案一:PC+运动控制卡方案
![附件 PC_运动控制卡方案.jpg]()
该方案需要软件工程师开发视觉部分工艺并且需要对接到MES等平台;电气工程师做PLC非标控制开发后再进行软件和控制系统的通讯对接。企业用人成本高,企业人员跨专业协作存在壁垒问题。
架构:由PC负责视觉处理、数据运算和人机界面等上层任务,运动控制卡专司实时运动控制。PC与运动控制卡之间通常通过PCIe或PCI通讯进行数据传输。
痛点:
● 通讯延迟:PCIe/PCI通讯存在较大的通讯交互延迟。
● 实时性不足:运动控制应用程序运行在Windows上,易受系统调度抖动影响,导致控制稳定性与实时性降低。
方案二:PLC方案
![附件 PLC方案.jpg]()
痛点:
● 轨迹控制能力弱:在复杂轨迹(如多轴联动插补)控制方面表现不足。
● 精度受限:难以满足高精度加工场景的需求。
● 通讯瓶颈:与PC等上位系统进行高效、大容量数据通讯存在困难。
正运动全自主实时运动控制内核MotionRT750方案
实时运动控制内核MotionRT750应运而生。它深度融合了PC的强大信息处理能力与运动控制卡的高性能轨迹控制及硬实时特性,充分发挥CPU的强劲算力优势。该内核专为满足高速高精加工与复杂轨迹控制等严苛场景而设计,为现代制造提供更可靠、更精细的运动控制能力。
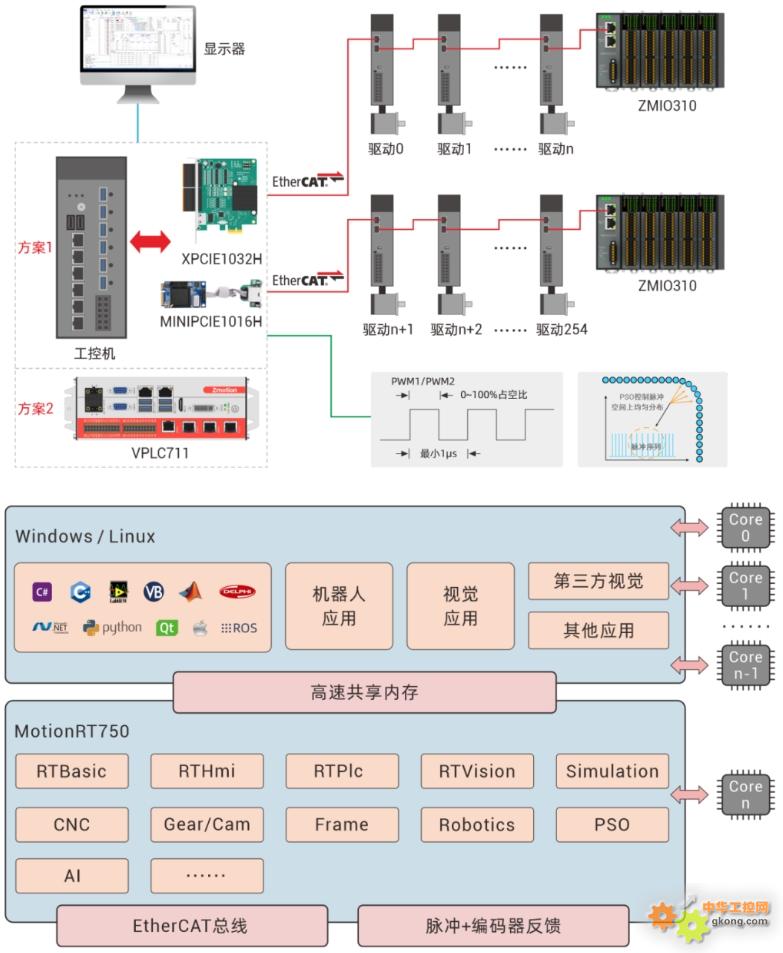
MotionRT750基于x86 CPU架构。在Windows/Linux操作系统下能实现裸机运行或强实时稳定运行。通过Local高速接口与EtherCAT冗余总线技术,可支持多达254轴的高精度运动控制,控制周期可低至125μs,显著提升设备性能,助力产能提升至少20%。
![附件 机器视觉运动控制一体机VPLC7系产品接线图.jpg]()
01 全自主实时运动控制内核MotionRT750
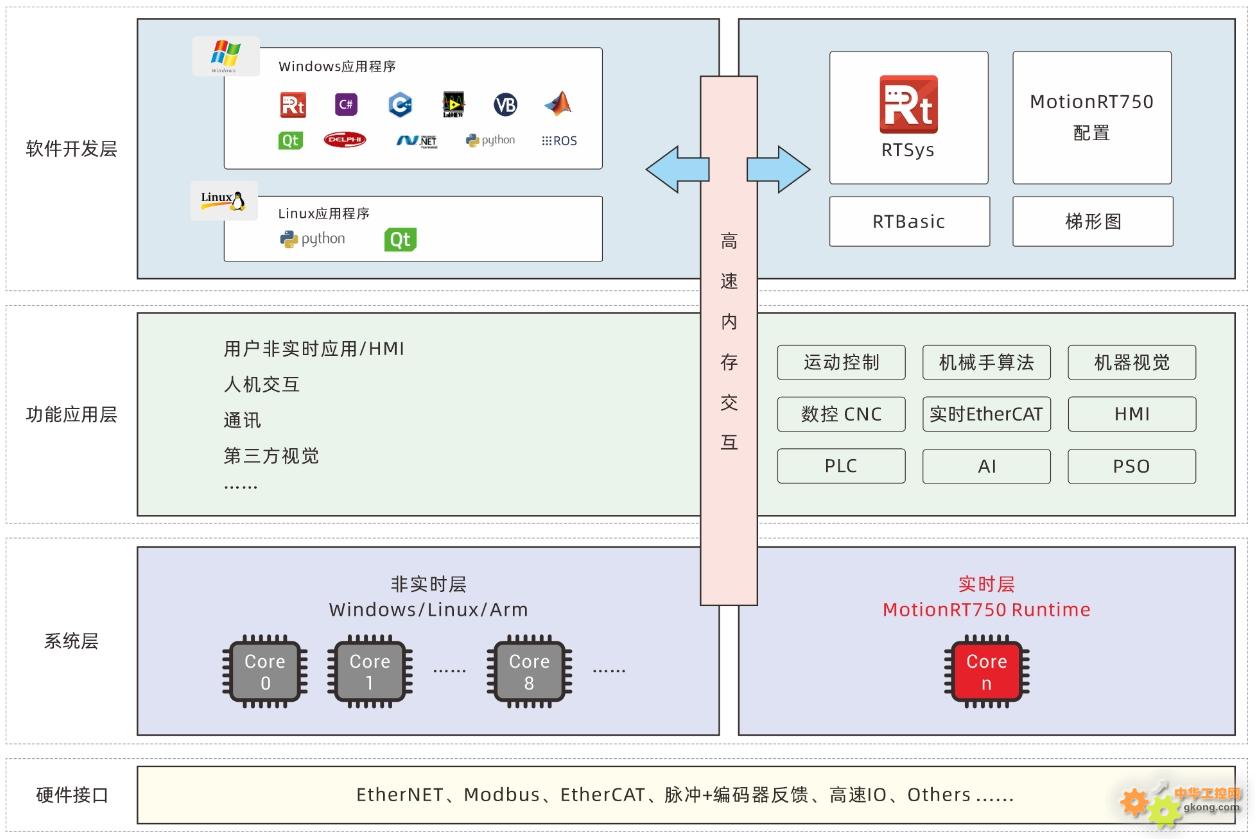
运动控制实时内核MotionRT750的实现机制:
MotionRT750运动控制实时内核采用高效的多核CPU任务分配策略:它将核心的运动控制、机器人算法、数控(CNC)及机器视觉等实时任务,集中运行在1-2个专用CPU核上。与此同时,其余CPU核则专注于处理Windows/Linux相关的非实时任务。
通过集成MotionRT750 Runtime实时层与操作系统非实时层,并利用高速共享内存进行数据交互,显著提升了运动控制与上层应用间的通信效率及函数执行速度,最终实现更稳定、更高效的智能装备控制,确保了运动控制任务的绝对实时性与系统稳定性。
![附件 运动控制实时内核MotionRT750的实现机制.jpg]()
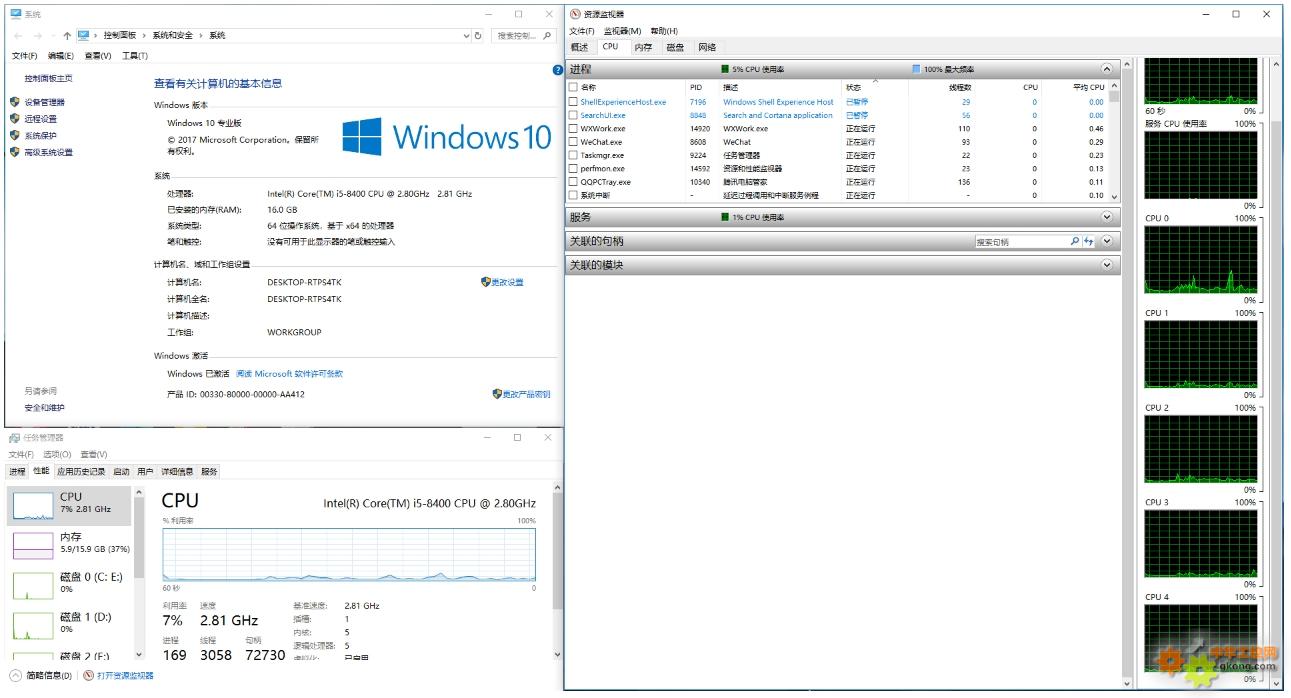
例如:在一个配备6核处理器(如Intel Core i5-8500)的系统上,MotionRT750会独占1个物理核心运行实时控制任务。其余5个核心则完全用于处理Windows/Linux操作系统及上层应用,实现资源的最优分配。
![附件 6核处理器示意图.jpg]()
运动控制实时内核MotionRT750的性能优势
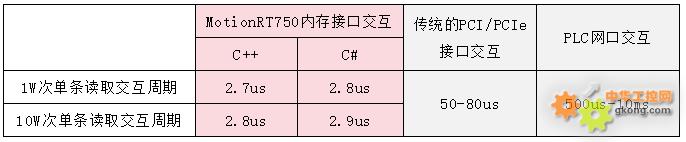
| 运动控制实时内核MotionRT750与传统运动控制卡/PLC的交互速率对比
共享内存的核间交互方式大幅度提升了交互效率,单条指令的交互时间也快至us级。相较于传统的PCI/PCIe、网口等通讯方式,速度提升了10-100倍以上。
通讯速度对比如下:
![附件 通讯速度对比图.jpg]()
![附件 通讯速度对比表.jpg]()
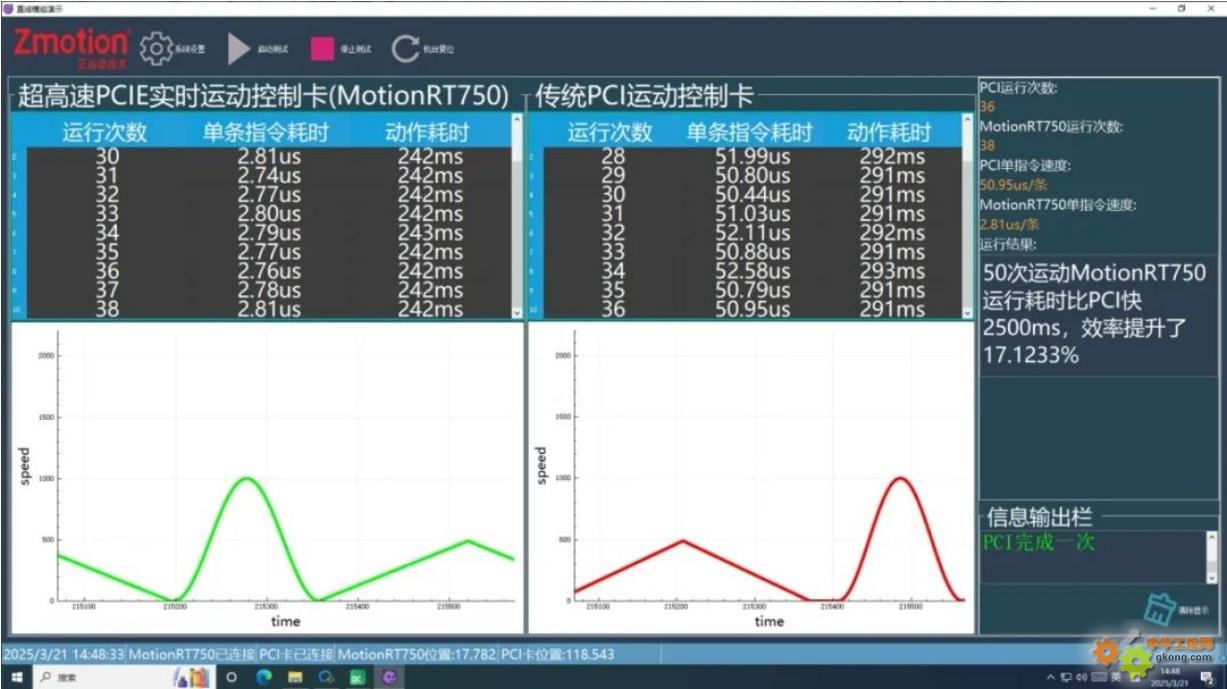
| MotionRT750超高速实时运动控制卡与传统PCI卡的场景测试对比
同一套测试环境下,通过50次直线电机的往复运动和10000次的IO循环翻转,测试数据如下。
MotionRT750(共享内存交互):
1.平均单次读写延迟:≈ 2.8μs
2.延迟稳定性:极高(波动极小)
传统方案(PCI通信):
1.平均单次读写延迟:≈ 51μs
2.延迟稳定性:较差(波动显著)
统计整个控制周期的执行时间,采用MotionRT750实时内核的方案比传统PCI通信方案缩短了约2500ms,整体控制效率提升超过17.1%。从实时性和效率性考虑,运动控制实时内核MotionRT750更适合高速高精的场合。
![附件 场景测试对比图.jpg]()
EtherCAT总线冗余,支持32轴同步控制与125us硬实时周期
· 环形冗余架构实现原理 ·
通过将末端从站的EtherCAT OUT端口回连至主站,构建物理环形通讯链路。当线性链路中任意从站发生故障时,系统将快速自动切换至另一路径,确保非故障从站持续保持正常EtherCAT通信,可显著提升系统可靠性与运行稳定性。
![附件 环形冗余架构实现原理图.jpg]()
针对连续生产场景对设备24/7不间断运行的要求,MotionRT750的冗余机制实现EtherCAT通讯的更可靠和更稳定,可有效杜绝非计划停产导致的产能损失。
![附件 EtherCAT总线冗余功能演示现场DEMO界面图.jpg]()
多通道EtherCAT架构实现254轴同步控制
运动控制实时内核MotionRT750可以实现多卡多通道EtherCAT总线,轴数控制可达254轴,总线周期500us,自由灵活搭配从站资源,具备低延迟、高带宽和精确同步的特点,适合实时数据传输和多工位协同的应用场景。
![附件 多通道EtherCAT架构实现254轴同步控制.jpg]()
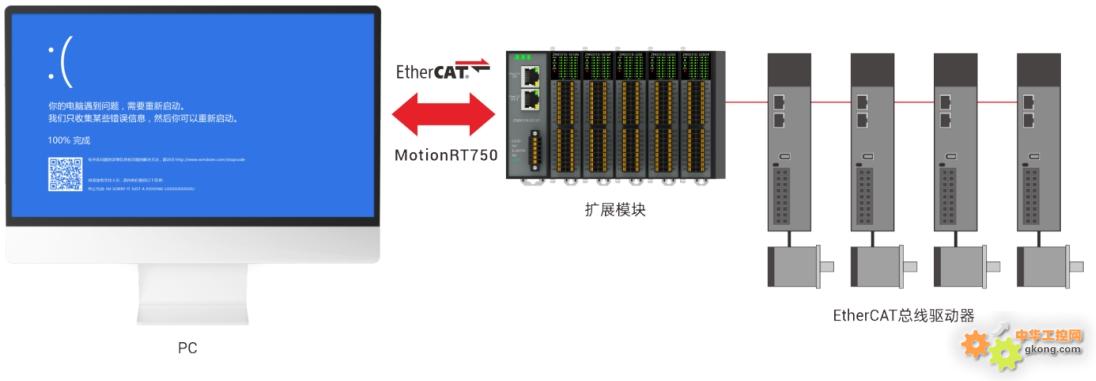
PC蓝屏/宕机/崩溃也能正常运行的实时内核
当Windows因病毒入侵、硬件异常插拔或驱动冲突导致系统崩溃时,运动控制实时内核MotionRT750仍可持续运行,且急停功能仍然保持有效,提供充分响应时间进行事故处置,显著提升工业控制安全性与可靠性。
![附件 PC蓝屏也能正常运行.jpg]()
应用优势总结
跨平台兼容性:支持Windows/Linux系统,适配不同等级CPU。
开发灵活性:提供多语言编程接口,便于二次开发与功能定制。
实时性提升:通过CPU内核独占机制与高效LOCAL接口,实现2-3μs指令交互周期,较传统PCI/PCIe方案提速近20倍。
扩展能力强化:多卡多EtherCAT通道架构支持254轴运动控制及500μsEtherCAT周期。
系统稳定性:32轴125μsEtherCAT冗余架构消除单点故障风险,保障连续生产。
安全可靠性:不惧Windows系统崩溃影响,蓝屏时仍可维持急停与安全停机功能有效,确保产线安全运行。
功能扩展性:实时内核支持C语言程序开发,方便功能拓展与实时代码提升效率。
随着精益柔性生产对速度与稳定性要求的不断提升,市场对运动控制系统的实时性与稳定性也提出了更高标准。
作为现代先进装备的核心大脑,高性能运动控制以其高精度、高速度、实时响应和高灵活性的精细化特性,驱动高端智能装备,实现精益生产与柔性制造。
常见传统方案:
传统运动控制方案主要有两种:PC+运动控制卡方案和PLC方案。
方案一:PC+运动控制卡方案

该方案需要软件工程师开发视觉部分工艺并且需要对接到MES等平台;电气工程师做PLC非标控制开发后再进行软件和控制系统的通讯对接。企业用人成本高,企业人员跨专业协作存在壁垒问题。
架构:由PC负责视觉处理、数据运算和人机界面等上层任务,运动控制卡专司实时运动控制。PC与运动控制卡之间通常通过PCIe或PCI通讯进行数据传输。
痛点:
● 通讯延迟:PCIe/PCI通讯存在较大的通讯交互延迟。
● 实时性不足:运动控制应用程序运行在Windows上,易受系统调度抖动影响,导致控制稳定性与实时性降低。
方案二:PLC方案

痛点:
● 轨迹控制能力弱:在复杂轨迹(如多轴联动插补)控制方面表现不足。
● 精度受限:难以满足高精度加工场景的需求。
● 通讯瓶颈:与PC等上位系统进行高效、大容量数据通讯存在困难。
正运动全自主实时运动控制内核MotionRT750方案
实时运动控制内核MotionRT750应运而生。它深度融合了PC的强大信息处理能力与运动控制卡的高性能轨迹控制及硬实时特性,充分发挥CPU的强劲算力优势。该内核专为满足高速高精加工与复杂轨迹控制等严苛场景而设计,为现代制造提供更可靠、更精细的运动控制能力。
MotionRT750基于x86 CPU架构。在Windows/Linux操作系统下能实现裸机运行或强实时稳定运行。通过Local高速接口与EtherCAT冗余总线技术,可支持多达254轴的高精度运动控制,控制周期可低至125μs,显著提升设备性能,助力产能提升至少20%。

01 全自主实时运动控制内核MotionRT750
运动控制实时内核MotionRT750的实现机制:
MotionRT750运动控制实时内核采用高效的多核CPU任务分配策略:它将核心的运动控制、机器人算法、数控(CNC)及机器视觉等实时任务,集中运行在1-2个专用CPU核上。与此同时,其余CPU核则专注于处理Windows/Linux相关的非实时任务。
通过集成MotionRT750 Runtime实时层与操作系统非实时层,并利用高速共享内存进行数据交互,显著提升了运动控制与上层应用间的通信效率及函数执行速度,最终实现更稳定、更高效的智能装备控制,确保了运动控制任务的绝对实时性与系统稳定性。
例如:在一个配备6核处理器(如Intel Core i5-8500)的系统上,MotionRT750会独占1个物理核心运行实时控制任务。其余5个核心则完全用于处理Windows/Linux操作系统及上层应用,实现资源的最优分配。
运动控制实时内核MotionRT750的性能优势
| 运动控制实时内核MotionRT750与传统运动控制卡/PLC的交互速率对比
共享内存的核间交互方式大幅度提升了交互效率,单条指令的交互时间也快至us级。相较于传统的PCI/PCIe、网口等通讯方式,速度提升了10-100倍以上。
通讯速度对比如下:

| MotionRT750超高速实时运动控制卡与传统PCI卡的场景测试对比
同一套测试环境下,通过50次直线电机的往复运动和10000次的IO循环翻转,测试数据如下。
MotionRT750(共享内存交互):
1.平均单次读写延迟:≈ 2.8μs
2.延迟稳定性:极高(波动极小)
传统方案(PCI通信):
1.平均单次读写延迟:≈ 51μs
2.延迟稳定性:较差(波动显著)
统计整个控制周期的执行时间,采用MotionRT750实时内核的方案比传统PCI通信方案缩短了约2500ms,整体控制效率提升超过17.1%。从实时性和效率性考虑,运动控制实时内核MotionRT750更适合高速高精的场合。
EtherCAT总线冗余,支持32轴同步控制与125us硬实时周期
· 环形冗余架构实现原理 ·
通过将末端从站的EtherCAT OUT端口回连至主站,构建物理环形通讯链路。当线性链路中任意从站发生故障时,系统将快速自动切换至另一路径,确保非故障从站持续保持正常EtherCAT通信,可显著提升系统可靠性与运行稳定性。
针对连续生产场景对设备24/7不间断运行的要求,MotionRT750的冗余机制实现EtherCAT通讯的更可靠和更稳定,可有效杜绝非计划停产导致的产能损失。

多通道EtherCAT架构实现254轴同步控制
运动控制实时内核MotionRT750可以实现多卡多通道EtherCAT总线,轴数控制可达254轴,总线周期500us,自由灵活搭配从站资源,具备低延迟、高带宽和精确同步的特点,适合实时数据传输和多工位协同的应用场景。
PC蓝屏/宕机/崩溃也能正常运行的实时内核
当Windows因病毒入侵、硬件异常插拔或驱动冲突导致系统崩溃时,运动控制实时内核MotionRT750仍可持续运行,且急停功能仍然保持有效,提供充分响应时间进行事故处置,显著提升工业控制安全性与可靠性。
应用优势总结
跨平台兼容性:支持Windows/Linux系统,适配不同等级CPU。
开发灵活性:提供多语言编程接口,便于二次开发与功能定制。
实时性提升:通过CPU内核独占机制与高效LOCAL接口,实现2-3μs指令交互周期,较传统PCI/PCIe方案提速近20倍。
扩展能力强化:多卡多EtherCAT通道架构支持254轴运动控制及500μsEtherCAT周期。
系统稳定性:32轴125μsEtherCAT冗余架构消除单点故障风险,保障连续生产。
安全可靠性:不惧Windows系统崩溃影响,蓝屏时仍可维持急停与安全停机功能有效,确保产线安全运行。
功能扩展性:实时内核支持C语言程序开发,方便功能拓展与实时代码提升效率。