














发表于:2025/6/12 15:05:57
#0楼
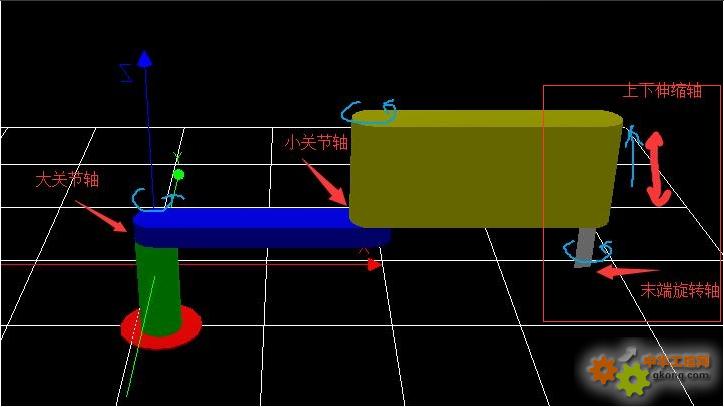
问题描述:Scara机械手逆解状态下虚拟R轴运动时,实际Z轴高度会变化
排查原因:
1.电机的转向和《正运动机械手指令说明》相反;
![附件 示意图.jpg]() 2.Zdis结构参数填写错误。
2.Zdis结构参数填写错误。
解决方法:
1.电机J1、J2、J4在俯视角度下正向运动时,保证是逆时针旋转,电机J3正向运动时应向上抬升。
2.检查结构参数,具有RZ耦合特征时(复合轴),耦合比Zdis和螺距需要设为一致;不具有RZ耦合特征时,耦合比Zdis需要设为0。
排查原因:
1.电机的转向和《正运动机械手指令说明》相反;
解决方法:
1.电机J1、J2、J4在俯视角度下正向运动时,保证是逆时针旋转,电机J3正向运动时应向上抬升。
2.检查结构参数,具有RZ耦合特征时(复合轴),耦合比Zdis和螺距需要设为一致;不具有RZ耦合特征时,耦合比Zdis需要设为0。
[此贴子已经被作者于2025/6/12 15:07:05编辑过]