














发表于:2025/4/11 11:28:54
#0楼
回零模式5/6:
mode=5/6(注:mode为指令中的参数,具体指令介绍可看往期主题帖)
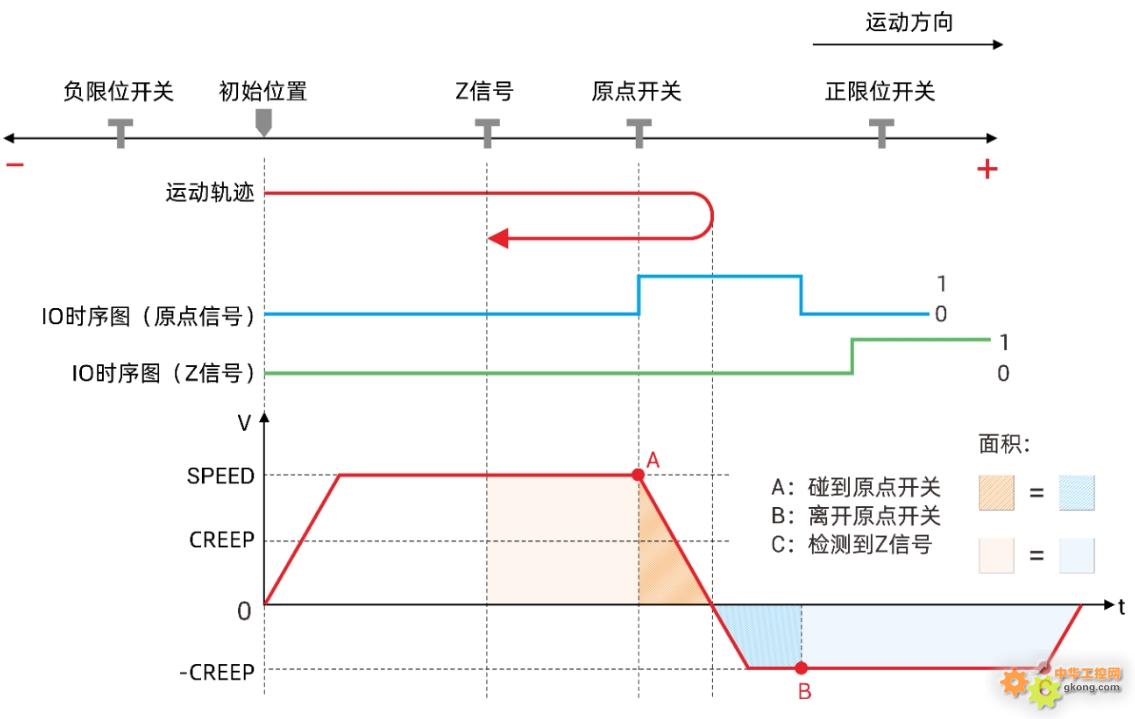
以模式5为例,轴先以SPEED正向找原点开关,碰到原点开关后开始减速,减速到0后再以CREEP反向运动,直至检测到Z信号减速停止。轴停止之后将DPOS值重置为0,当前所处位置为零点,回零途中若碰到限位立即停止。
回零模式6与模式5找原点运动方向相反。(下图以模式5为例)
![附件 模式5.jpg]()
更多详情内容请点击→“正运动技术官网”查看。
mode=5/6(注:mode为指令中的参数,具体指令介绍可看往期主题帖)
以模式5为例,轴先以SPEED正向找原点开关,碰到原点开关后开始减速,减速到0后再以CREEP反向运动,直至检测到Z信号减速停止。轴停止之后将DPOS值重置为0,当前所处位置为零点,回零途中若碰到限位立即停止。
回零模式6与模式5找原点运动方向相反。(下图以模式5为例)
更多详情内容请点击→“正运动技术官网”查看。