发表于:2024/7/29 14:43:39
#0楼
市场应用背景
在各类手机中框、VR/AR边框、异形屏/曲面屏、智能手表手环等3C消费电子产品的复杂型面点胶加工过程中,市面上常见的直角坐标型点胶机已无法满足工件在被其他部件遮挡的倾斜、弯曲或边缘表面位置进行精准点胶操作,导致点胶头无法到达固定加工区域或难以一次完成点胶任务,进而影响产品的整体点胶质量。
![附件 应用行业.jpg]()
为解决复杂型面点胶路径中胶阀与工件的干涉问题,胶阀须与产品表面形成特定夹角,保证与点胶路径切线垂直且相对线速度恒定。适应异型工件需多维度调整胶阀相对姿态。
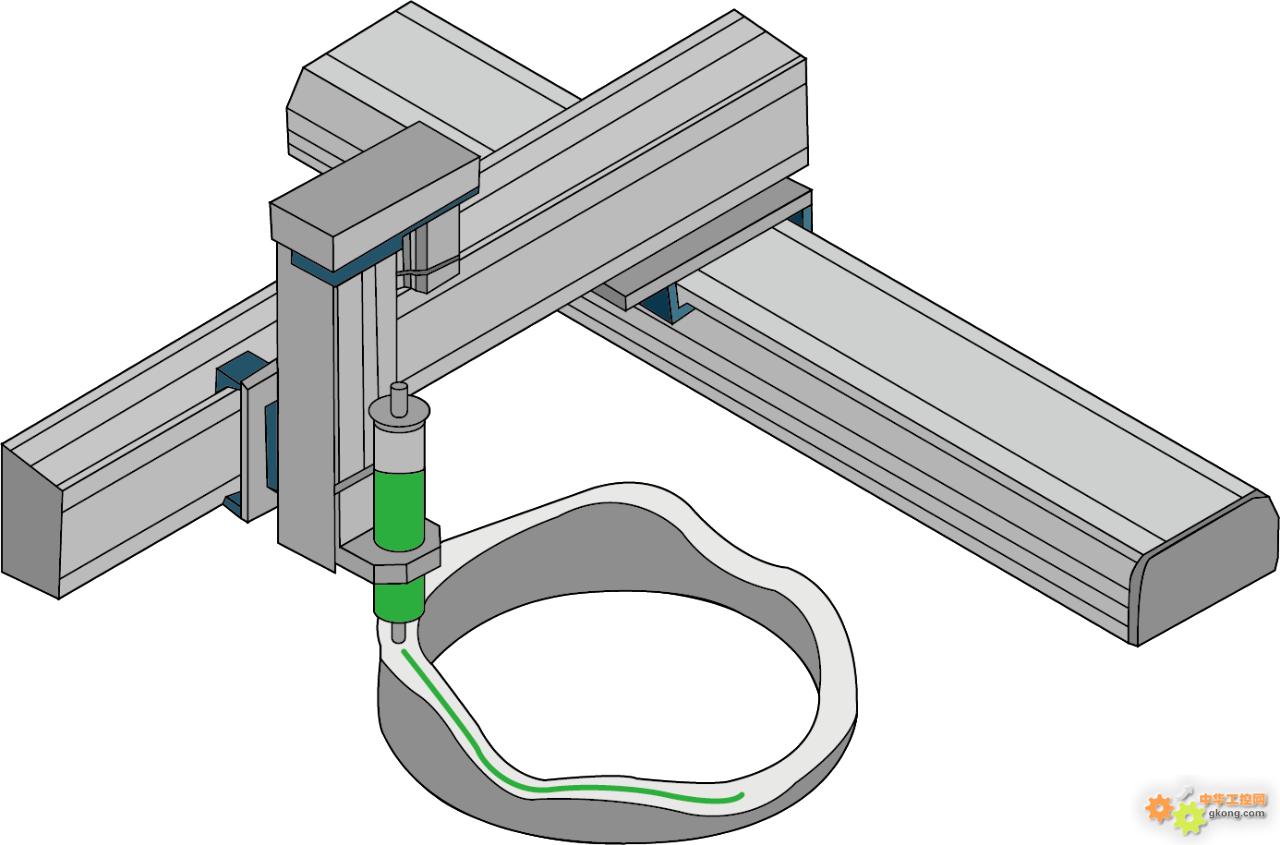
五轴联动点胶机结合直线轴X、Y、Z及旋转轴A、B,实现点胶阀到达复杂型面加工的空间控制,执行高精度的点胶任务,成为对于存在点胶路径复杂型面的产品的最佳选择。
三轴、四轴点胶机方案局限性:
这类点胶机的移动方式是基于直角坐标系统,适合执行直线或轻微曲面任务的点胶任务。不适合加工具有狭窄腔内、斜面等复杂型面工件。
灵活性和适应性:在点胶加工过程中,点胶阀与工件的位姿和角度不能动态调整,因此通常仅适用于处理基本形状和几何形状的加工路径任务。但对于具有复杂型面的工件,其灵活性和适应性受到限制。
精度和效率:当遇到需要在多个空间曲线或复杂型面上进行点胶的任务时,可能需要使用多台设备并进行多次定位安装。这不仅增加了生产成本,加工工序多,也降低了整体点胶加工效率,同时多次参数设定和校准可能导致丢失部分点胶精度。
![附件 三轴、四轴点胶机.jpg]()
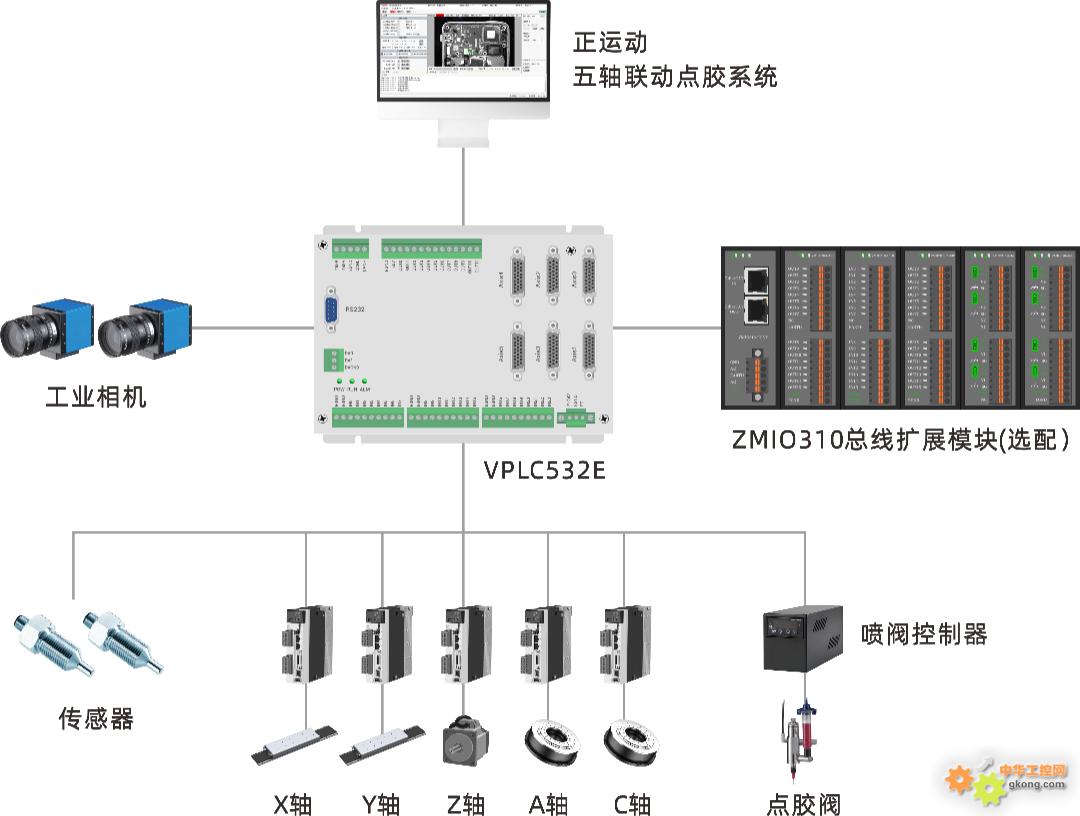
正运动技术解决方案:
正运动技术针对现有市场需求,开发了一种基于VPLC系列机器视觉运动控制一体机的五轴联动点胶解决方案,适用于各种复杂型面工件的高精度点胶和各种胶水。
方案方案采用RTCP刀具中心点跟随技术算法,可实现各类空间轨迹的追随控制,实现点胶阀或工件边点胶边倾斜调整角度,点胶轨迹路径始终与产品翻转姿态保持一致,确保了点胶加工过程的连续性和平滑性,还显著提高了空间曲面点胶加工的精度、质量和效率。
方案同时减少了复杂型面工件的点胶加工工序,可通过集中处理多个工序,实现高速高精的点胶加工,简化了生产流程,更好地灵活适应复杂型面工件的点胶生产需求。
![附件 正运动解决方案.jpg]()
更多精彩内容点击→VPLC系列机器视觉运动控制一体机在五轴联动点胶上的应用
在各类手机中框、VR/AR边框、异形屏/曲面屏、智能手表手环等3C消费电子产品的复杂型面点胶加工过程中,市面上常见的直角坐标型点胶机已无法满足工件在被其他部件遮挡的倾斜、弯曲或边缘表面位置进行精准点胶操作,导致点胶头无法到达固定加工区域或难以一次完成点胶任务,进而影响产品的整体点胶质量。

为解决复杂型面点胶路径中胶阀与工件的干涉问题,胶阀须与产品表面形成特定夹角,保证与点胶路径切线垂直且相对线速度恒定。适应异型工件需多维度调整胶阀相对姿态。
五轴联动点胶机结合直线轴X、Y、Z及旋转轴A、B,实现点胶阀到达复杂型面加工的空间控制,执行高精度的点胶任务,成为对于存在点胶路径复杂型面的产品的最佳选择。
三轴、四轴点胶机方案局限性:
这类点胶机的移动方式是基于直角坐标系统,适合执行直线或轻微曲面任务的点胶任务。不适合加工具有狭窄腔内、斜面等复杂型面工件。
灵活性和适应性:在点胶加工过程中,点胶阀与工件的位姿和角度不能动态调整,因此通常仅适用于处理基本形状和几何形状的加工路径任务。但对于具有复杂型面的工件,其灵活性和适应性受到限制。
精度和效率:当遇到需要在多个空间曲线或复杂型面上进行点胶的任务时,可能需要使用多台设备并进行多次定位安装。这不仅增加了生产成本,加工工序多,也降低了整体点胶加工效率,同时多次参数设定和校准可能导致丢失部分点胶精度。
正运动技术解决方案:
正运动技术针对现有市场需求,开发了一种基于VPLC系列机器视觉运动控制一体机的五轴联动点胶解决方案,适用于各种复杂型面工件的高精度点胶和各种胶水。
方案方案采用RTCP刀具中心点跟随技术算法,可实现各类空间轨迹的追随控制,实现点胶阀或工件边点胶边倾斜调整角度,点胶轨迹路径始终与产品翻转姿态保持一致,确保了点胶加工过程的连续性和平滑性,还显著提高了空间曲面点胶加工的精度、质量和效率。
方案同时减少了复杂型面工件的点胶加工工序,可通过集中处理多个工序,实现高速高精的点胶加工,简化了生产流程,更好地灵活适应复杂型面工件的点胶生产需求。

更多精彩内容点击→VPLC系列机器视觉运动控制一体机在五轴联动点胶上的应用