发表于:2022/10/17 15:29:42
#0楼
直线插补--MOVE
单轴直线运动或多轴直线插补运动,相对运动距离。绝对运动使用MOVEABS指令,SP运动使用MOVESP指令。
插补运动参数采用主轴参数,插补运动缓冲在主轴的运动缓冲区。
语法:MOVE(distance1 [,distance2 [,distance3 [,distance4...]]])
Basic编写示例:
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1) '选择轴0,轴1
ATYPE=1,1
UNITS=100,100
SPEED=100,100 '运动速度
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100 'S曲线
MERGE=ON '开启连续插补
TRIGGER '自动触发示波器
DPOS=100,0 '坐标偏移
MOVE(-50,100) '第一段相对运动
MOVE(-100,0) '第二段相对运动
MOVE(-50,-100) '第三段相对运动
MOVE(50,-100) '第四段相对运动
MOVE(100,0) '第五段相对运动
MOVE(50,100) '第六段相对运动
END
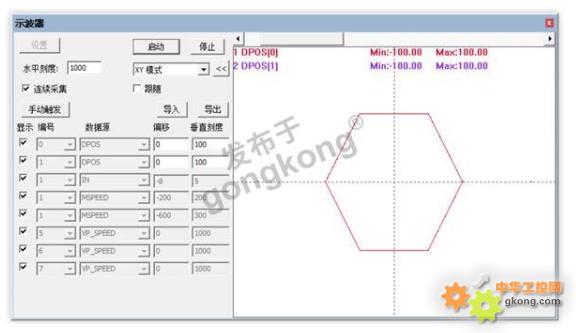
直线插补合成轨迹如下图:起点和终点均为(100,0),逆时针加工。
![附件 企业微信截图_20221017152925.jpg]()
单轴直线运动或多轴直线插补运动,相对运动距离。绝对运动使用MOVEABS指令,SP运动使用MOVESP指令。
插补运动参数采用主轴参数,插补运动缓冲在主轴的运动缓冲区。
语法:MOVE(distance1 [,distance2 [,distance3 [,distance4...]]])
Basic编写示例:
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1) '选择轴0,轴1
ATYPE=1,1
UNITS=100,100
SPEED=100,100 '运动速度
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100 'S曲线
MERGE=ON '开启连续插补
TRIGGER '自动触发示波器
DPOS=100,0 '坐标偏移
MOVE(-50,100) '第一段相对运动
MOVE(-100,0) '第二段相对运动
MOVE(-50,-100) '第三段相对运动
MOVE(50,-100) '第四段相对运动
MOVE(100,0) '第五段相对运动
MOVE(50,100) '第六段相对运动
END
直线插补合成轨迹如下图:起点和终点均为(100,0),逆时针加工。