发表于:2021/12/6 11:49:01
#0楼
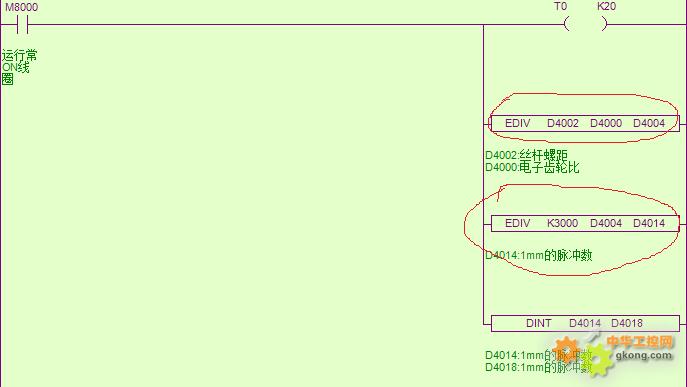
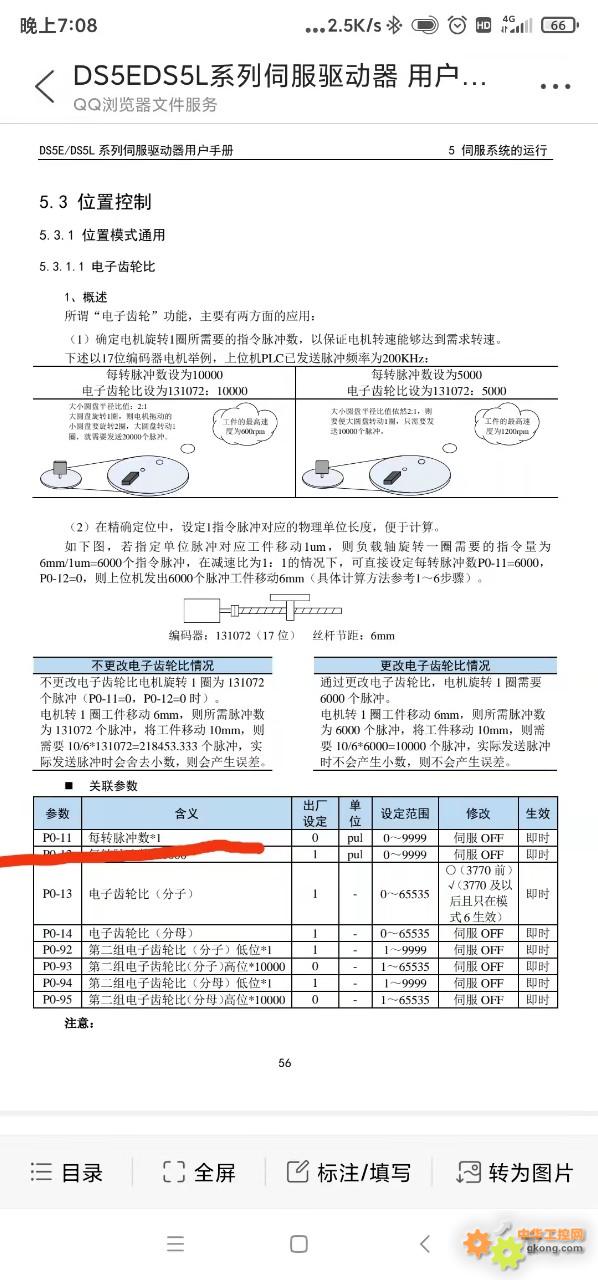
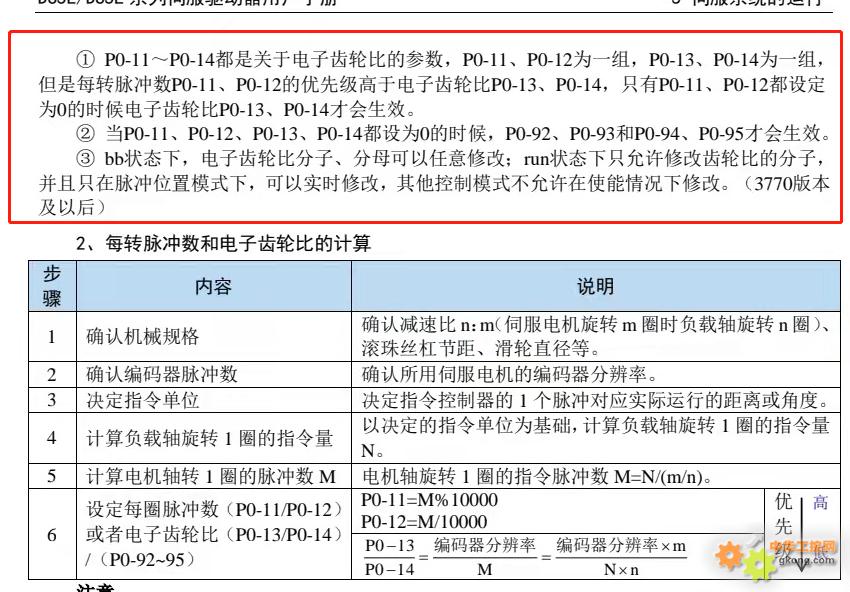
用户手册中电子齿轮比相关参数P0-11至P0-14,
当设定了P0-11=3000、P0-12=0后,因为优先级后面的P0-13、P0-14就不用了,
那这个电子齿轮比是多少啊?是一个变量么?![附件 11.jpg]()
![附件 22.jpg]()
当设定了P0-11=3000、P0-12=0后,因为优先级后面的P0-13、P0-14就不用了,
那这个电子齿轮比是多少啊?是一个变量么?
[此贴子已经被作者于2021/12/6 12:11:25编辑过]