发表于:2020/5/8 21:38:16
#0楼
硬件配置:
树莓派4B,自带网口作为ECAT口,USB转网口作为编程监控网卡。
HMI是 威纶通 在线模拟方式和树莓派通讯,方便测试,玩。 好像叫做codesys OPC服务来来着,做HMI编程很方便,获取标签就可以了。不用对PLC绝对地址。
![附件 001.jpg]()
![附件 1.jpg]()
![附件 2.jpg]()
![附件 3.jpg]()
![附件 4.jpg]()
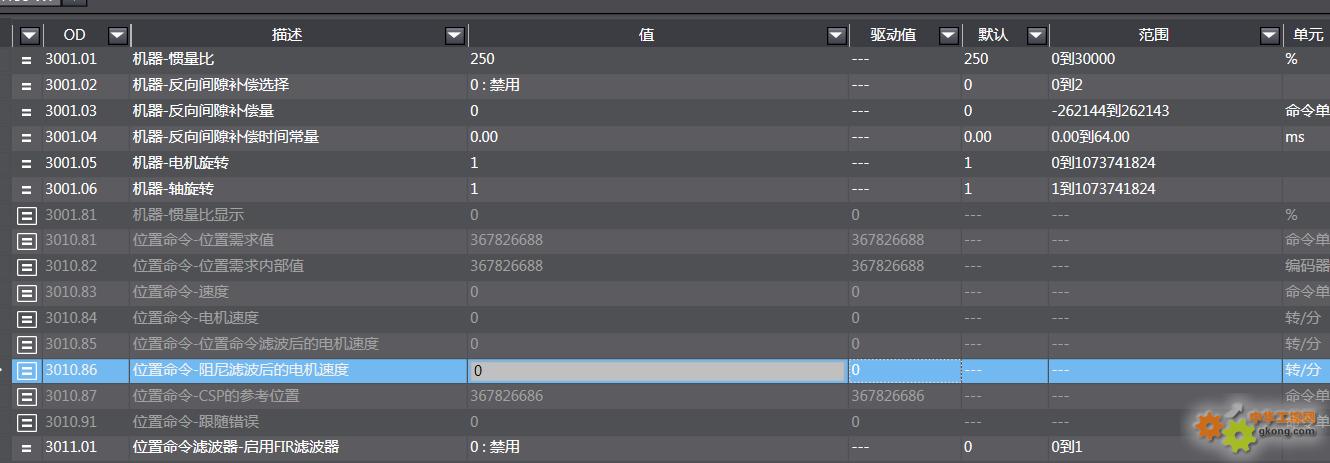
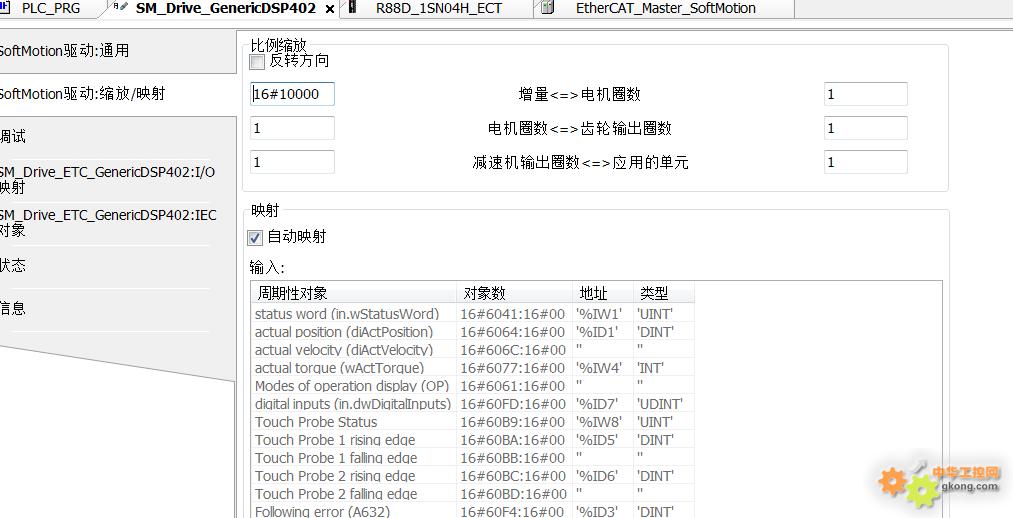
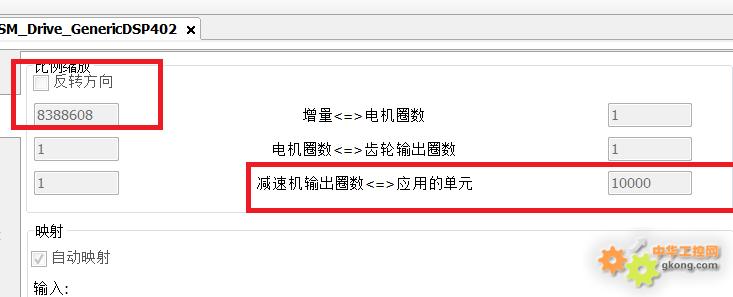
疑问1:实际转速和伺服软件不一致,codesys里面设置的是3000.实际才1400,
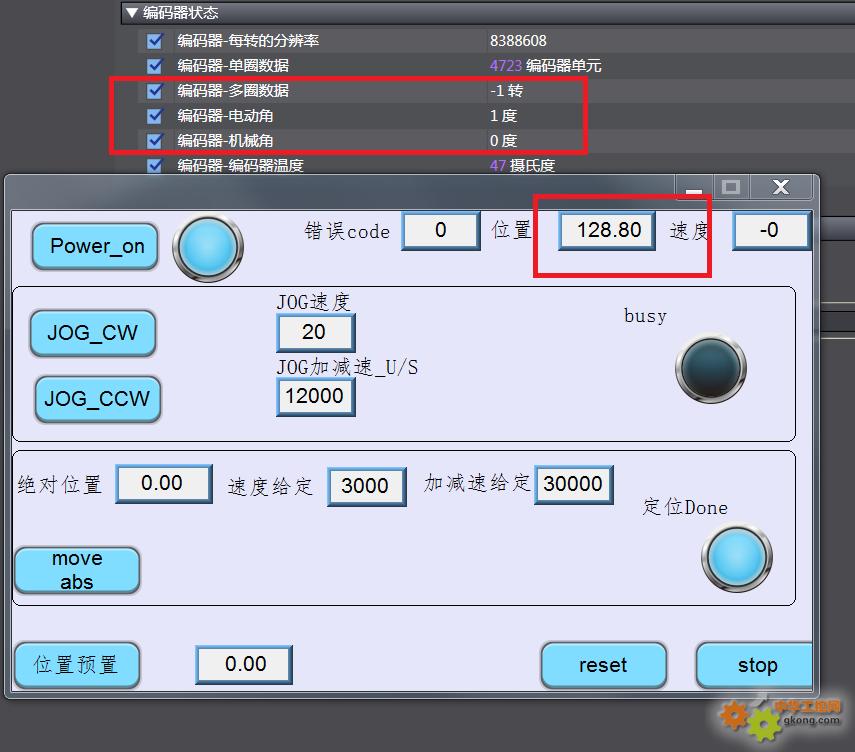
疑问2:电机实际转一圈,codesys 读取位置值在128.00左右。
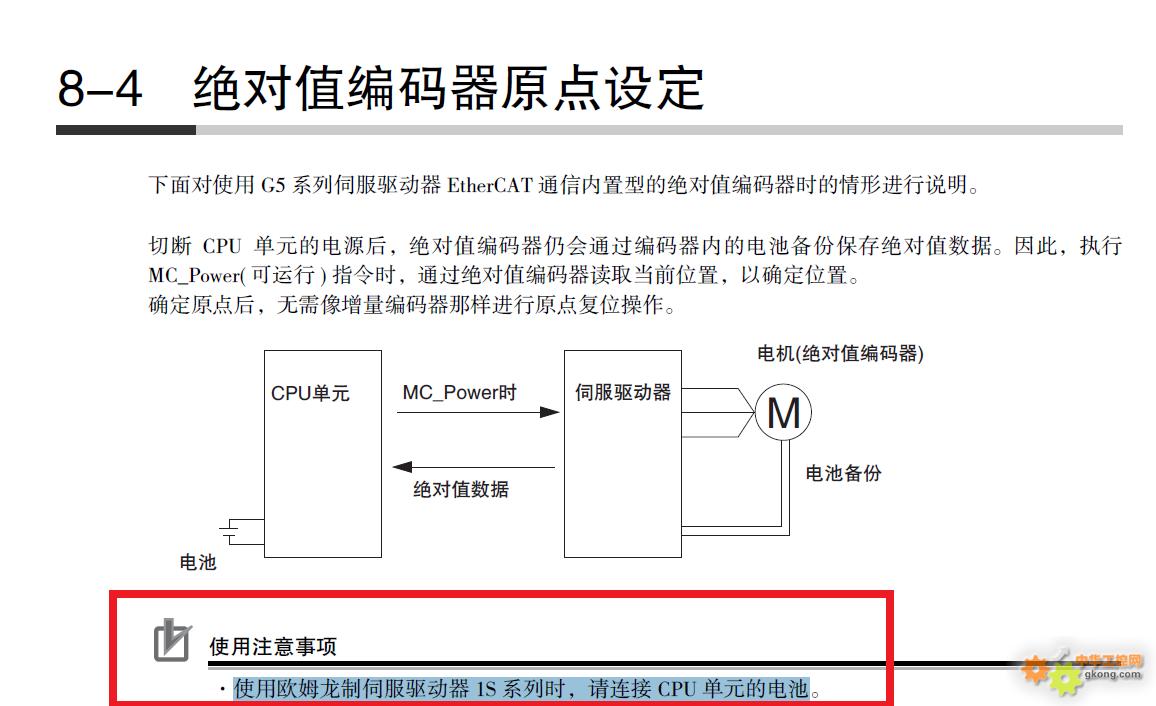
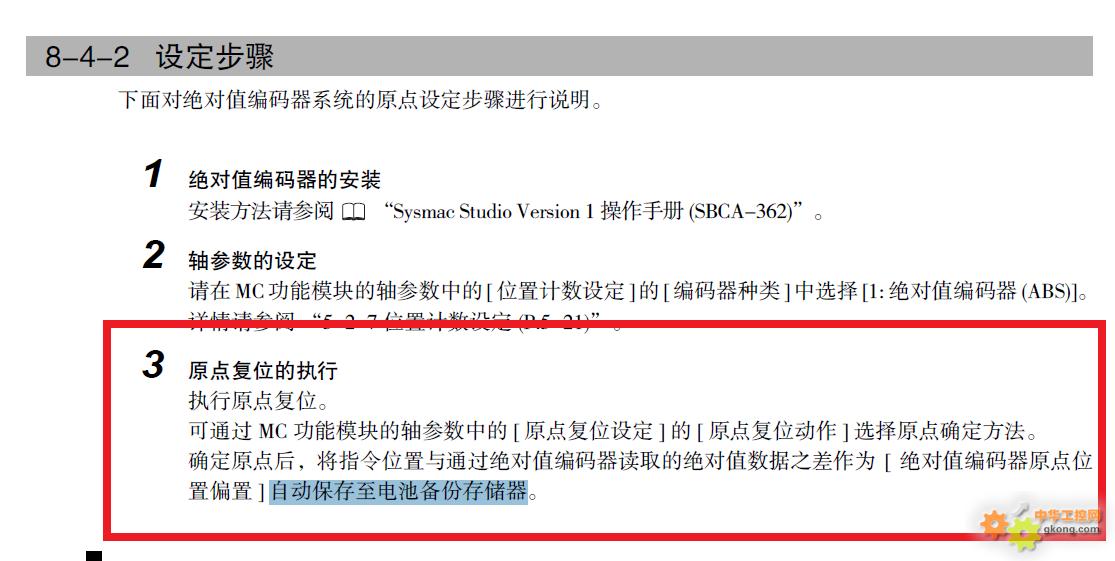
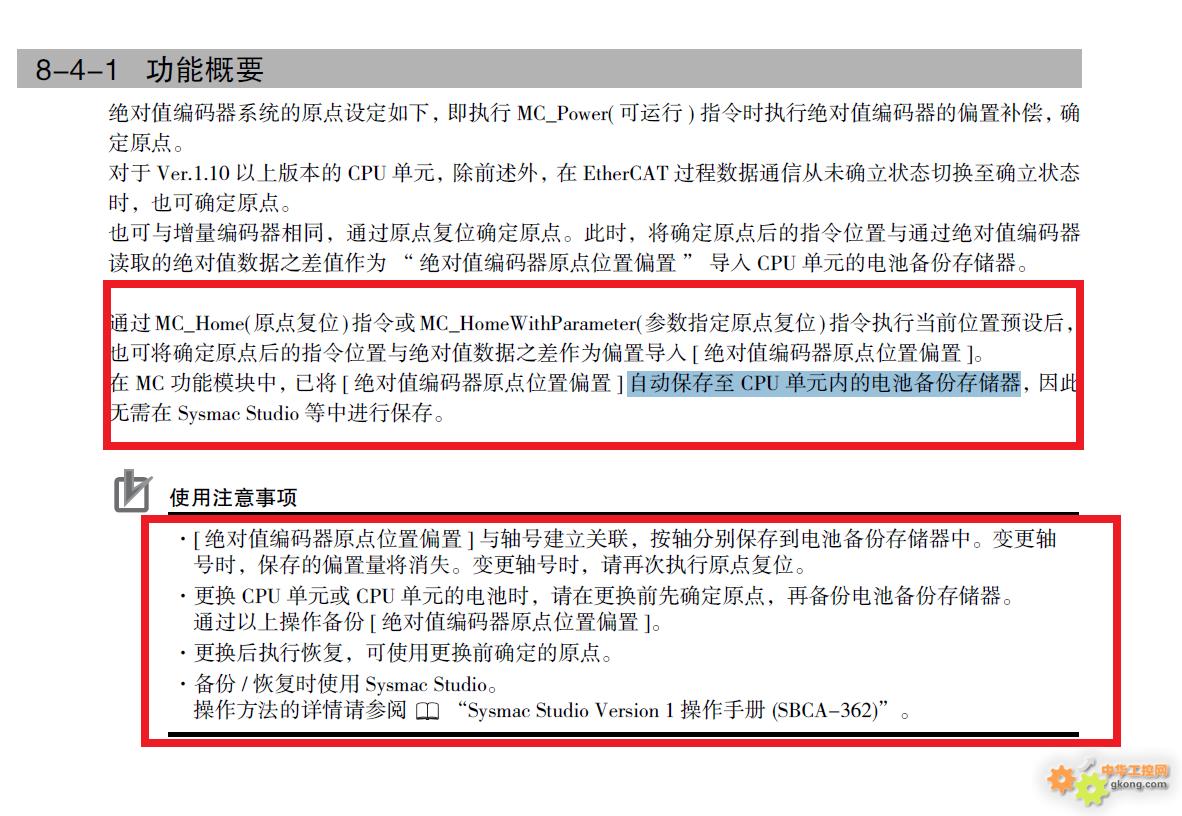
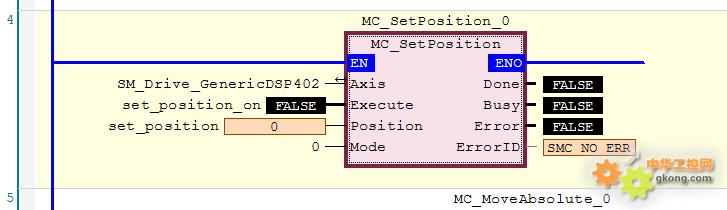
疑问3: 在实际应用中,需要给绝对值伺服设置原点(0点),避免每次开机复位找原点。
我找了一个MC_Setposition,这个可以设定为你想要的位置值(CODESYS_读取值),但是重启以后就会变成绝对值编码器的值!
PS:当然,原点(0点)可以用伺服驱动器软件设置一次就OK了,但是实际中应该很少这样操作吧,M2总线的安川伺服驱动器我试过可以用PLC设置0点、
顺便分享我拼凑出来的CODESYS程序吧,菜鸟玩可以看看,编译前要添加欧姆龙驱动器设备库文件XML的吧,R88D-1SN,官网有下载。
编译提示其它库文件报错啥的,下载缺失的库就可以了。(这个好像常规操作吧?)
PLC+HMI:
自己有实物记得改ECAT 配置的MAC IP地址啥的,包括HMI的IP地址
树莓派4B,自带网口作为ECAT口,USB转网口作为编程监控网卡。
HMI是 威纶通 在线模拟方式和树莓派通讯,方便测试,玩。 好像叫做codesys OPC服务来来着,做HMI编程很方便,获取标签就可以了。不用对PLC绝对地址。
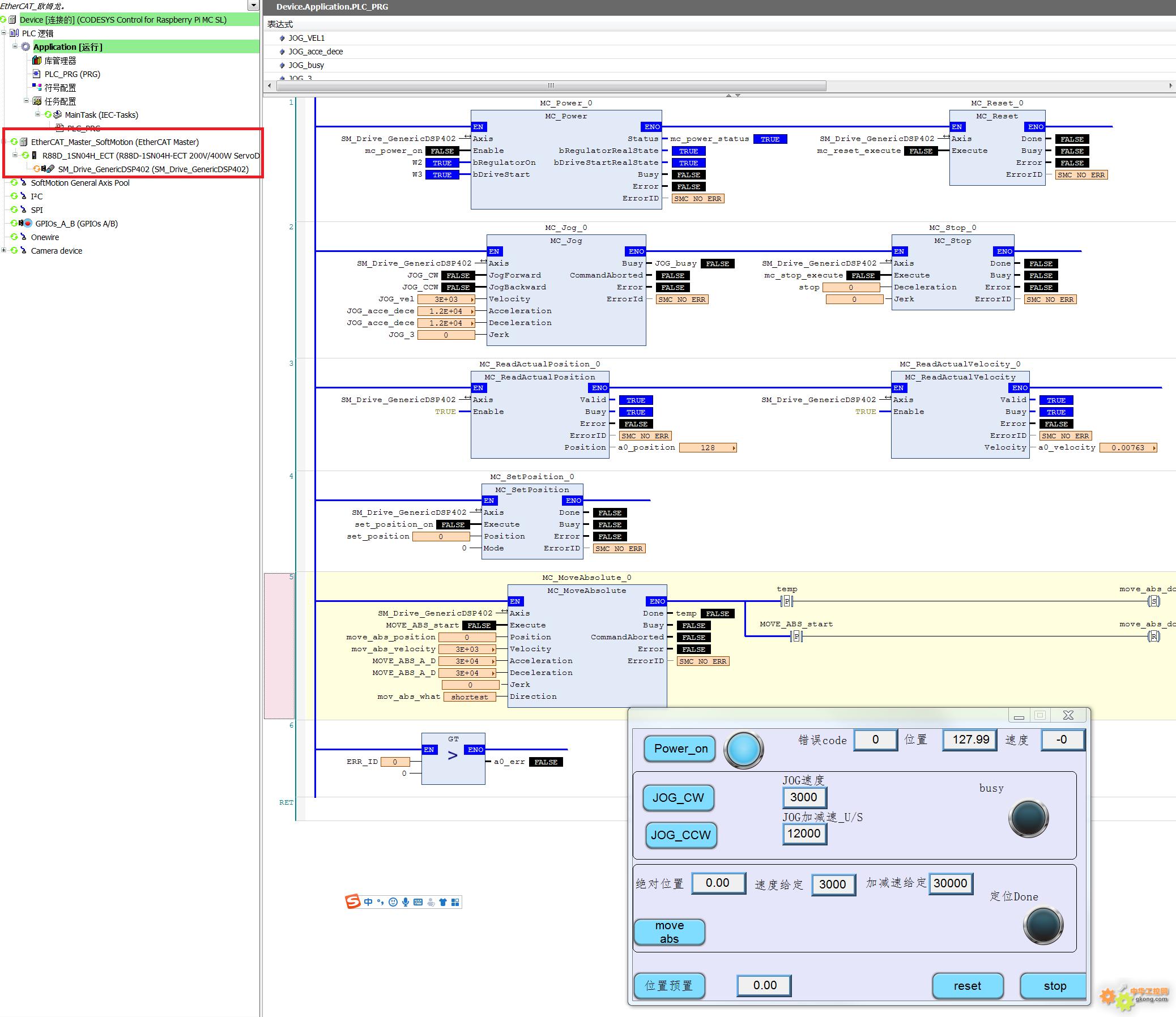
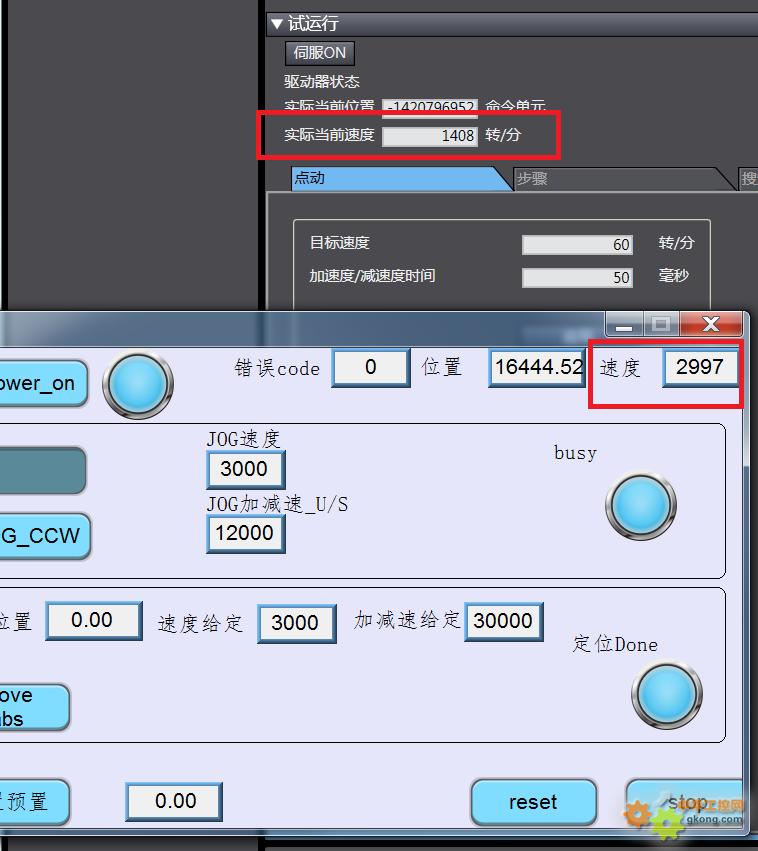

疑问1:实际转速和伺服软件不一致,codesys里面设置的是3000.实际才1400,
疑问2:电机实际转一圈,codesys 读取位置值在128.00左右。
疑问3: 在实际应用中,需要给绝对值伺服设置原点(0点),避免每次开机复位找原点。
我找了一个MC_Setposition,这个可以设定为你想要的位置值(CODESYS_读取值),但是重启以后就会变成绝对值编码器的值!
PS:当然,原点(0点)可以用伺服驱动器软件设置一次就OK了,但是实际中应该很少这样操作吧,M2总线的安川伺服驱动器我试过可以用PLC设置0点、
顺便分享我拼凑出来的CODESYS程序吧,菜鸟玩可以看看,编译前要添加欧姆龙驱动器设备库文件XML的吧,R88D-1SN,官网有下载。
编译提示其它库文件报错啥的,下载缺失的库就可以了。(这个好像常规操作吧?)
PLC+HMI:
附件:
[本地下载]自己有实物记得改ECAT 配置的MAC IP地址啥的,包括HMI的IP地址