














发表于:2017/2/16 9:37:06
#0楼
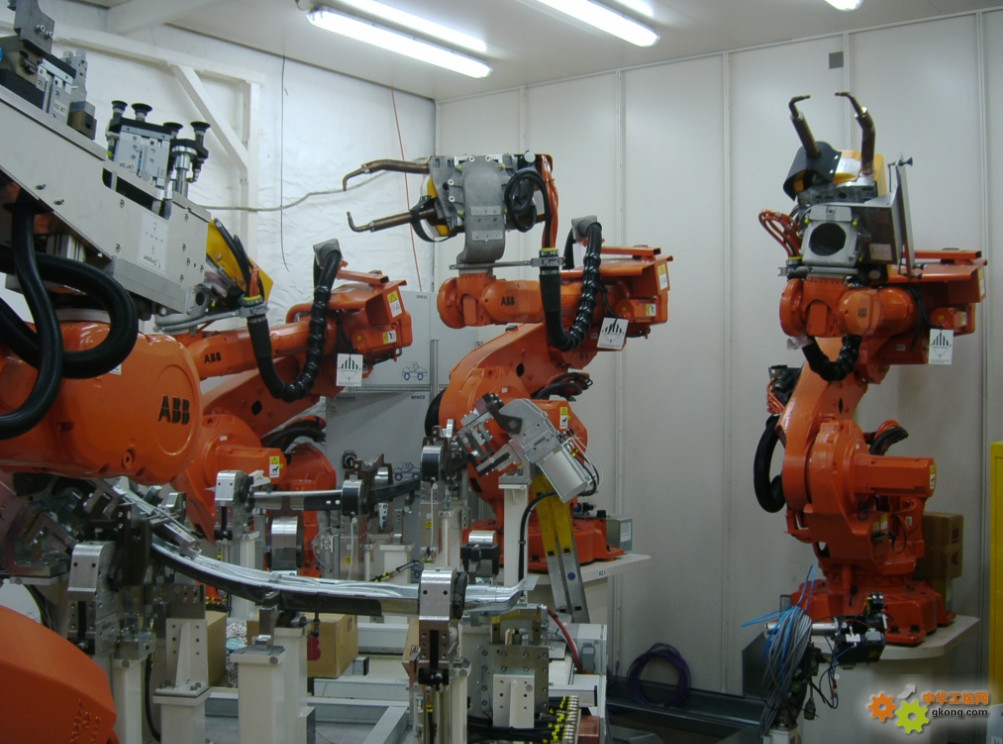
点焊
![附件 3.jpg]()
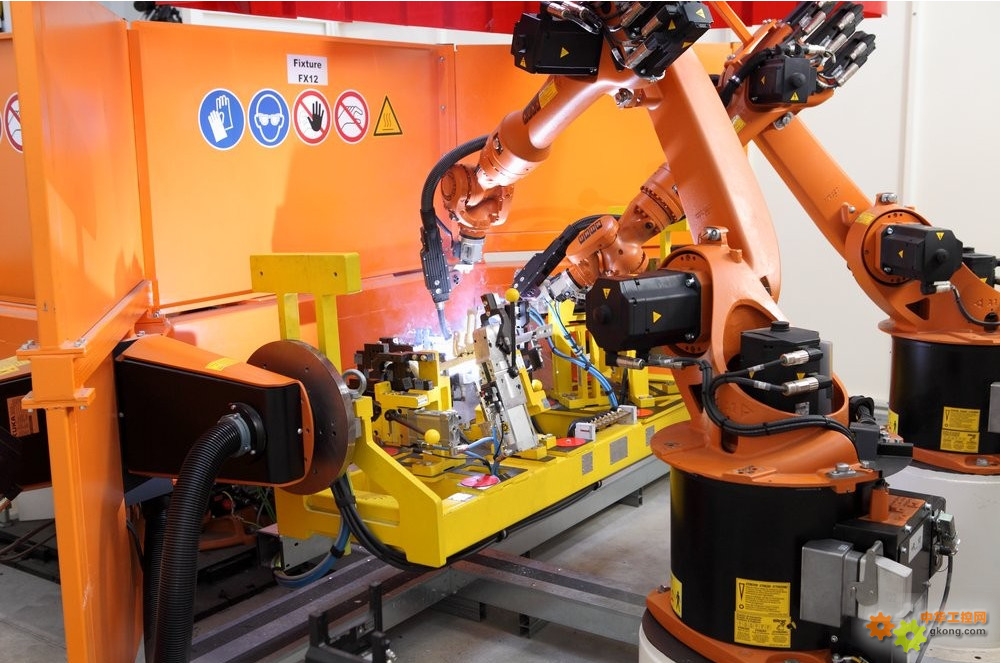
焊接
![附件 1.jpg]()
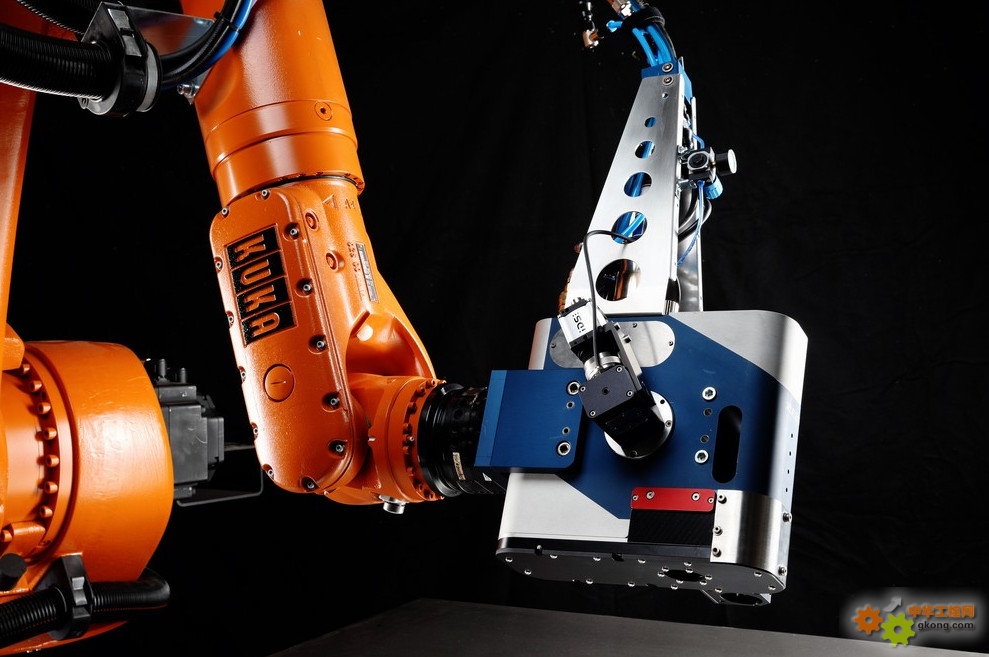
太阳能
![附件 7.jpg]()
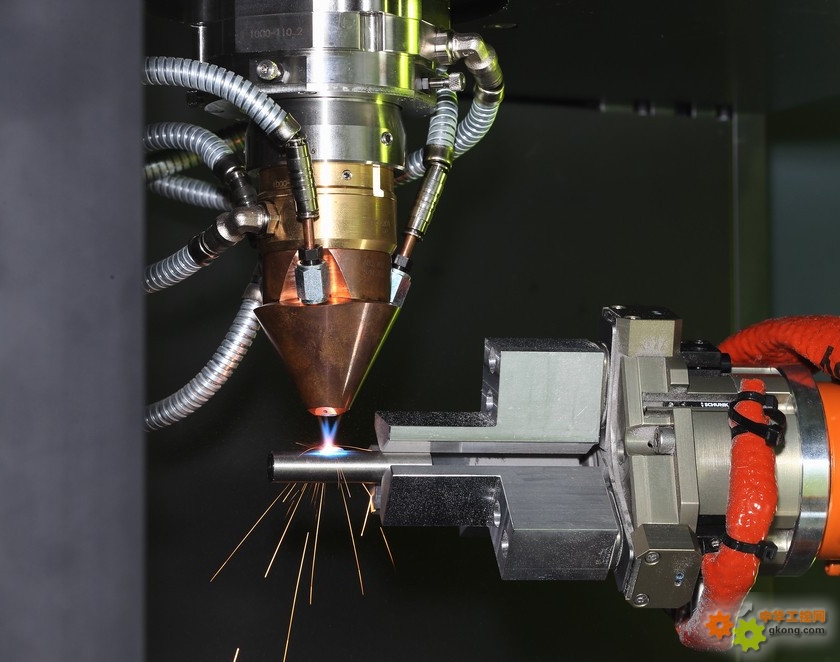
激光
![附件 9.jpg]()
![附件 10.jpg]()
合模机
![附件 11.jpg]()
焊接
太阳能

激光
合模机


