














发表于:2013/8/25 23:06:37
#0楼
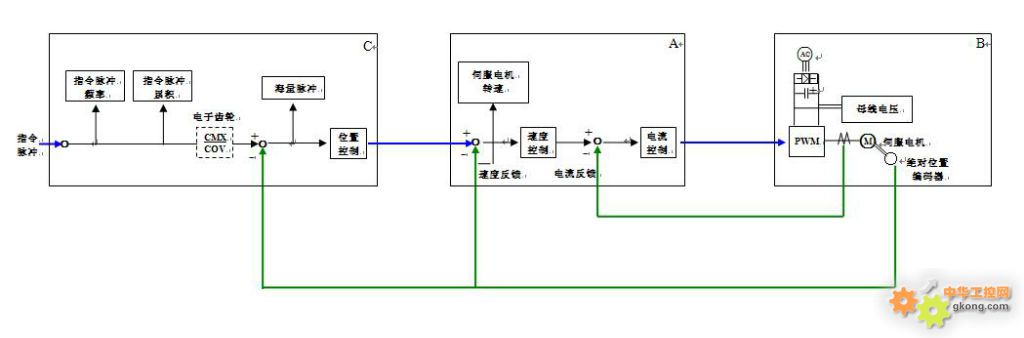
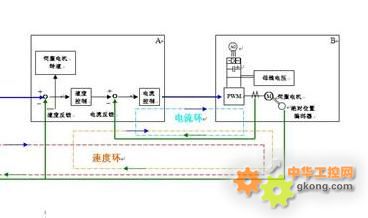
1、伺服三环框图
2、C为控制器,A+B是驱动器,伺服电机为执行原件,编码器为检测反馈元件;
3、A框到B框的蓝色信号线里,就是调节控制频率、电压的信号,速度环、电流环的调解器都是频率f电压U调节器;
4、C框为控制器,相当PLC的作用,通过计数器知道伺服当前位置,并根据当期位置输出:启动、减速、匀速、减速、停车等指令;
5、A+B就是驱动器,相当变频器,通过调节频率f电压U,控制伺服的速度、电流和启动停止!
6、伺服电源线上的电流互感器表示电流检测原件,将检测结果回馈给电流环的输入端与给定电流比较,构成电流闭环;
7、编码器检测的脉冲频率数的微分,就是检测脉冲的频率,这个频率就是电机的转速的大小,反馈到速度环的输入端与给定速度比较,构成速度环;
8、编码器检测的脉冲数,表示电机的位移量,与给定指令脉冲数比较,确定判断伺服当前位置,相当于PLC里一个由计数器构成的逻辑判断功能,他不是一个自动控制PID闭环;


1、运动控制的三环;
2、变频器,即驱动器,有电流环和速度环;
3、控制器,即PLC,由计数器构成的位置环,该环不是PID闭环!
4、所谓速度环、电流环就是伺服电机调速电路的速度环、电流环,速度环控制期间,电机为硬特性;电流环控制期间电机呈软铁性!
5、所有伺服,伺服电机的控制就是一个“电机调速电路”,可以是交流电机的变频调速电路,也可以是直流电机的调速电路;
6、那么电机的启动、加速、匀速、减速、停车指令,由位置环产生,或者说由PLC构成的控制器产生;
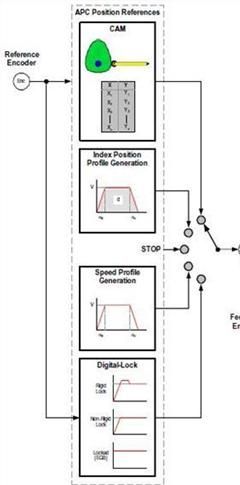
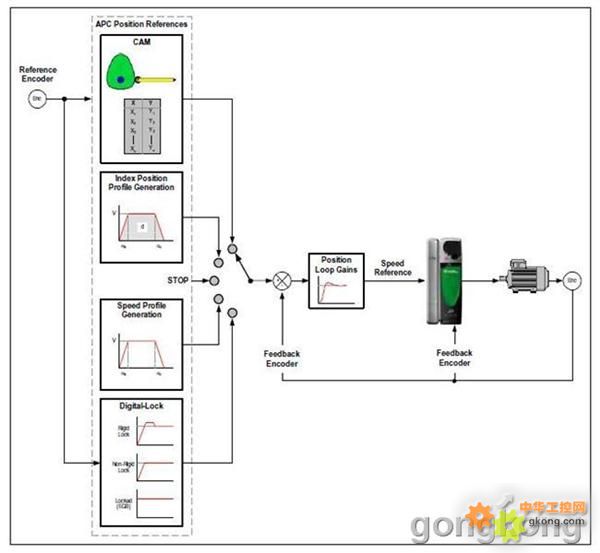
1、这个图中,是说伺服指令脉冲数(位置)、指令脉冲频率(速度)给定的方式;
2、举例说电子凸轮给定方式、位置给定方式等;
3、所有伺服,不管他是什么型号,什么厂家、国家,伺服的速度环、电流环都在伺服电机的调速电路上!
4、如果是交流电机,肯定是在变频调速电路上!如果是直流电机肯定在直流调压 调速电路上!
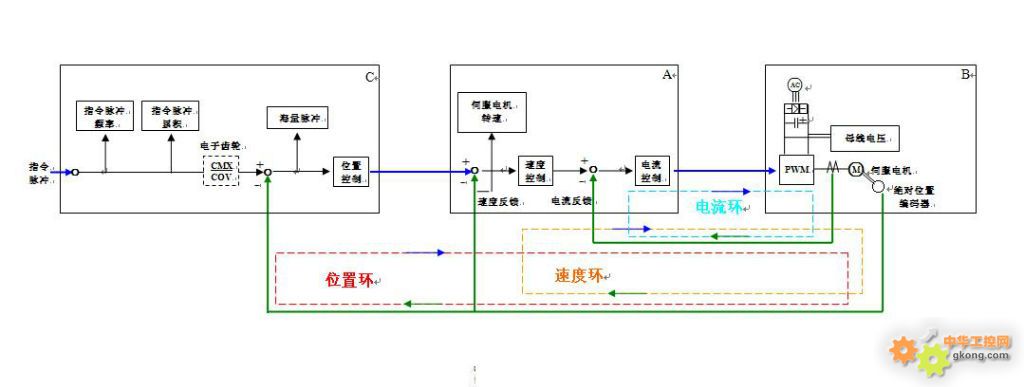
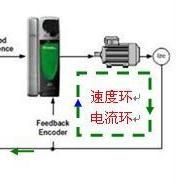
1、上边这个三环框图中,A+B就是变频调速度驱动器,有速度环、电流环构成;
2、对比上边的三环图,可以看出变频器就是伺服电机的速度环、电流环,他们的结构框图实质是一样的!
3、或者说A+B就是变频器的闭环框图:
引用 my39366 的回复内容:
……根据指令位置(速度?),结合位置环增益,给出速度,再根据速度环增益,给出需要的电流,最终位置、速度都反应在电流的大小上。……
--------------------------------------------------------------------------------
1、这是个错误的说法;
2、速度环,保证电机以给定速度运行,这时如果负载重,电机的力矩大电流大;
3、速度环,保证电机以给定速度运行,这时如果负载庆,电机的力矩小电流小;
4、速度环,保证电机以给定速度运行,这时负载大小变化时,电机力矩、电流跟随负载轻重自动变化变化;
2、电流环,保证电机以给定电流、力矩运行,这时如果负载重,电机的速度迅速减小,保持力矩、电流恒定;
3、电流环,保证电机以给定电流、力矩运行,这时如果负载轻,电机的速度迅速增大;保持力矩、电流恒定;
4、电流环,保证电机以给定电流、力矩运行,这时负载大小变化时,电机的速度大小跟随负载轻重自动变化;
5、速度环与电流环自动控制的物理量不同,调节器“调节频率、电压的方向”因负载轻重变化而相反:
1)举例说速度环,负载重时,调节器调高频率、电压;
2)举例说电流环,负载重时,调节器调低频率、电压;
6、所以速度环、电流环的调解器不能同时工作;
5、速度环与电流环自动控制的物理量不同:
1)一个保持电机速度恒定,一个保证电机电流恒定;
2)负载轻重变化,前者保持速度恒定,而电机电流变化,后者保持电机电流恒定,运动体的速度变化:
6、所以速度环、电流环不能同时工作;
7、很多人一下子转不过弯来,他们想,电机有速度,也要有电流,当然是速度环、电流环同时工作的;
8、他们以为:
1)电机的速度来源速度环,速度环不工作就没了速度;
2)电机的电流来源电流环,电流环不工作就没了电流;
9、他们的错误是,没有认识到速度环是控制速度大小的,没有速度环或者速度环不工作时,只是电机速度得不到控制;
10、他们的错误是,没有认识到电流环是控制电流大小的,没有电流环或者电流环不工作时,只是电机电流得不到控制;
11、任何时候,电机速度、电流,只能控制一个,不能两个同时控制!
12、任何时候,电机速度、电流,只能控制一个,不能两个同时控制!所以电流环、速度环不能同时工作!
13、速度闭环控制,电机机械特性硬;
14、电流闭环控制,电机机械特性软;
15、他们各自有各自的用场,举例说
1)在速度闭环时,如果电流过载失速保护,是电流环起的作用,速度环失速;
2)机加工主轴,一般需要速度闭环控制,保持车削速度很定;
3)收放卷控制,一般需要电流闭环恒转矩控制,保证即拉不断,也不会散乱!
1、下来说说伺服控制中的“增益”是什么意思?
2、交流伺服的“增益”,变频调速时,实际就是提高电机的频率-电压曲线的电压;
3、调高增益,会使交流电机在频率一定的情况下电压调高,可以调高力矩曲线,但电机的速度不变,受速度环的控制;
4、调高电压,调高转矩,是在一个合适的区间,超调电压都会适得其反,有经验的人知道,电压超调时,过高、过低都会使电机电流增大,损耗增大、转矩下降!
5、当你需要较高的速度时,你就去速度环设定调高速度,电机速度才会得以提高!不一定要提高增益!
1、所谓位置环的“环”,不是我们说的PID闭环,位置不能像速度大小、电流大小那样通过调节器调节;
2、电机转子、运动体的位置可以用编码器也可以直接用位置检测的方法,所以伺服都有直接位置检测信号的输入接口!
3、所谓运动控制的方式,主要是看运动体的那个运动参数受到控制:
1)力矩控制模式:就是电机电流闭环控制,例如收、放卷控制系统;
2)速度控制模式:就是速度闭环控制模式,例如机加工的主轴速度的控制;
3)位置控制模式:就是运动体的位置控制,例如机加工的车刀进给控制;
4、三种控制模式的差异:
1)力矩控制模式,电机电流大小受控,速度不受控,负载力矩小时,速度就快,反之,负载力矩大时,速度就慢,速度的大小处于被动变化,而电流、力矩是主动变化;
2)速度控制模式,电机的速度大小受到控制,电流不受控,负载力矩小时,电流就小,反之,负载力矩大时,电流就大,电流的大小处于被动变化,而速度是主动变化;
3)位置控制模式,只要是控制运动体的位移或者位置,速度可大可小,电流可大可小,电流、速度的控制为位移或位置的控制而服务,处于协助、协调、服从、需要的位置;
4)三种模式都有电机的“启、停”,唯有位置控制模式,电机的“起、停”与确定的“起点”和“终点”相关,是确定的“起点”“终点”决定了电机的“起停”!
[此贴子已经被作者于2013/8/25 23:11:31编辑过]


