














发表于:2013/3/2 11:27:58
#0楼
编码器输出脉冲的波形、频率发生畸变的原因是电机速度引起的
引用 笨鳥慢飛 的回复内容:回复内容:对:刘志斌关于5、这就是电机速度对编码器输出波形和频率的影响,当人们怀疑脉冲受到干扰时,其实是用编码器输出脉冲数检测位置的弊端在起作用! 内容的回复:樓上圖形証明你又在瞎說 干擾是受到電機轉速頻率的關係這些圖都是實測的 這顆磁感式編碼器解析度1024方波
--------------------------------------------------------------------------------
1、“干擾是受到電機轉速頻率的關係”,什么是“電機轉速頻率”?
2、编码器输出的脉冲波形、频率,与电机的转速成正比关系,也就是说电机速度决定了编码器脉冲的波形与频率;
3、脉冲的频率不同,脉冲信号的处理电路不同,或者这样说,不同频率的脉冲要有不同的处理电路,同一电路只能处理它频率范围内的脉冲;
4、一个编码器之所以在电机速度高、低不同时,有不同的表现,不是什么干扰的问题,是脉冲频率随着电机速度发生了很大变化,电路对不同频率、波形的脉冲处理结果不同的缘故;
5、举例说吧,收音机有长波、中波、短波波段之分,不同波段的信号由不同的电路来处理,中波断的信号不能处理长波或短波信号!
![附件]()
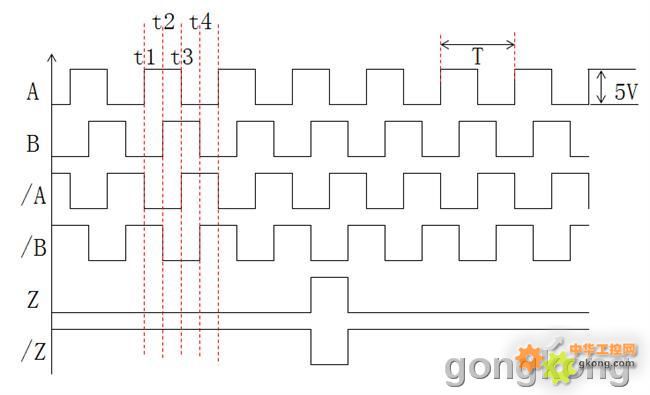
1、如图,方波的周期是T;
2、如果刻线数是360,则T=1/电机转速(r/s)÷360;
3、如果电机转速是1r/s,则T=1/360秒,波形如上图;
4、如果电机转速是60r/s,则T=1/21600秒,波形如下图;
![附件]()
5、这就是电机速度对编码器输出波形和频率的影响,当人们怀疑脉冲受到干扰时,其实是用编码器输出脉冲数检测位置的弊端在起作用!
6、所以适宜高转速的编码器是低解析度的编码器;
7、所以一个编码器,要有低解析度脉冲,也要有高解析度脉冲,才能适应速度变化大的场合!
8、所以一个编码器,如果能输出周反馈脉冲,又能输出周高解析度脉冲,一个在电机高速时检测位移,一个在低速时用高分辨率检测位移,这就是编码器之所以输出多个解析度脉冲的意义!
9、同一台电机之所以选择安装多个编码器,说明编码器有缺陷,好的编码器只需要一个,因为它能输出不同带宽的反馈脉冲,同时适应高、低速运行!
10、现在才真正接触到伺服控制的瓶颈处,所有存在的问题都集中在编码器及其相关脉冲处理电路上,解开了长期困扰大家的所谓伺服“脉冲干扰”问题。
引用 笨鳥慢飛 的回复内容:
……以下这图 可以看出法兰克FANUC 两个磁式编码器的架构 一個編碼器是方波的 另一個就是弦波的編碼器 方波做為車牙用 旋波做為C軸定位用 許多客戶都異想天開 我想用一顆編碼器 來處理C軸及主軸定位功能 那是不可能 關鍵不在編碼器而是在數控器上 或驅動器的接口及頻寬的限制
--------------------------------------------------------------------------------
1、这句话的意思是,由于电机的运行速度在两个区段,需要配不同频宽的编码器;
2、这样就出现同一个电机在做“車牙用”和 “C軸定位用”两个不同频宽的编码器;
3、不可能用一个编码器,否则会出现一种运行正常,而另一种运行异常的情况;
4、这个情况过去被大家称为“干扰”,实际是编码器的缺陷造成的!
引用 笨鳥慢飛 的回复内容:笨鳥丟出一個題目給大家思考 竟然沒人敢參與討論 那我后續怎還寫得下去
--------------------------------------------------------------------------------
1、笨鳥慢飛说,“竟然沒人敢參與討論”,其实是因为笨鳥慢飛的发言“东一榔头,西一棒捶”,只有笨鳥慢飛自己明白;
2、我来梳理一下笨鳥慢飛的发言:
1)编码器的输出脉冲的波形和频率,会因伺服电机的速度而变化,这就是笨鳥慢飛说的编码器的频宽;
2)伺服电机的工作状态,有高速和低速,要用不同频宽的编码器;
3)举例说,编码器的输出脉冲波形,在低速时是方波,在高速时就不是方波了,更高速时就什么也不是了,无法分辨了;
4)高解析度的编码器,适宜低速运行的电机;
3、我们在调试伺服电机时,速度高低变化,编码器输出的脉冲波形会发生很大的变化,会使脉冲处理电路失态、失效;
4、在很多情况下,只要伺服电机有那么几秒高速运行,甚至有1秒的飞车运行,就足以使位置闭环颠覆!
引用 笨鳥慢飛 的回复内容:
……以下这图 可以看出法兰克FANUC 两个磁式编码器的架构 一個編碼器是方波的 另一個就是弦波的編碼器 方波做為車牙用 旋波做為C軸定位用 許多客戶都異想天開 我想用一顆編碼器 來處理C軸及主軸定位功能 那是不可能 關鍵不在編碼器而是在數控器上 或驅動器的接口及頻寬的限制
--------------------------------------------------------------------------------
1、这句话的意思是,由于电机的运行速度在两个区段,需要配不同频宽的编码器;
2、这样就出现同一个电机在做“車牙用”和 “C軸定位用”两个不同频宽的编码器;
3、不可能用一个编码器,否则会出现一种运行正常,而另一种运行异常的情况;
4、这个情况过去被大家称为“干扰”,实际是编码器的缺陷造成的!
引用 笨鳥慢飛 的回复内容:回复内容:对:刘志斌关于5、这就是电机速度对编码器输出波形和频率的影响,当人们怀疑脉冲受到干扰时,其实是用编码器输出脉冲数检测位置的弊端在起作用! 内容的回复:樓上圖形証明你又在瞎說 干擾是受到電機轉速頻率的關係這些圖都是實測的 這顆磁感式編碼器解析度1024方波
--------------------------------------------------------------------------------
1、“干擾是受到電機轉速頻率的關係”,什么是“電機轉速頻率”?
2、编码器输出的脉冲波形、频率,与电机的转速成正比关系,也就是说电机速度决定了编码器脉冲的波形与频率;
3、脉冲的频率不同,脉冲信号的处理电路不同,或者这样说,不同频率的脉冲要有不同的处理电路,同一电路只能处理它频率范围内的脉冲;
4、一个编码器之所以在电机速度高、低不同时,有不同的表现,不是什么干扰的问题,是脉冲频率随着电机速度发生了很大变化,电路对不同频率、波形的脉冲处理结果不同的缘故;
5、举例说吧,收音机有长波、中波、短波波段之分,不同波段的信号由不同的电路来处理,中波断的信号不能处理长波或短波信号!
1、如图,方波的周期是T;
2、如果刻线数是360,则T=1/电机转速(r/s)÷360;
3、如果电机转速是1r/s,则T=1/360秒,波形如上图;
4、如果电机转速是60r/s,则T=1/21600秒,波形如下图;

5、这就是电机速度对编码器输出波形和频率的影响,当人们怀疑脉冲受到干扰时,其实是用编码器输出脉冲数检测位置的弊端在起作用!
6、所以适宜高转速的编码器是低解析度的编码器;
7、所以一个编码器,要有低解析度脉冲,也要有高解析度脉冲,才能适应速度变化大的场合!
8、所以一个编码器,如果能输出周反馈脉冲,又能输出周高解析度脉冲,一个在电机高速时检测位移,一个在低速时用高分辨率检测位移,这就是编码器之所以输出多个解析度脉冲的意义!
9、同一台电机之所以选择安装多个编码器,说明编码器有缺陷,好的编码器只需要一个,因为它能输出不同带宽的反馈脉冲,同时适应高、低速运行!
10、现在才真正接触到伺服控制的瓶颈处,所有存在的问题都集中在编码器及其相关脉冲处理电路上,解开了长期困扰大家的所谓伺服“脉冲干扰”问题。
引用 笨鳥慢飛 的回复内容:
……以下这图 可以看出法兰克FANUC 两个磁式编码器的架构 一個編碼器是方波的 另一個就是弦波的編碼器 方波做為車牙用 旋波做為C軸定位用 許多客戶都異想天開 我想用一顆編碼器 來處理C軸及主軸定位功能 那是不可能 關鍵不在編碼器而是在數控器上 或驅動器的接口及頻寬的限制
--------------------------------------------------------------------------------
1、这句话的意思是,由于电机的运行速度在两个区段,需要配不同频宽的编码器;
2、这样就出现同一个电机在做“車牙用”和 “C軸定位用”两个不同频宽的编码器;
3、不可能用一个编码器,否则会出现一种运行正常,而另一种运行异常的情况;
4、这个情况过去被大家称为“干扰”,实际是编码器的缺陷造成的!
引用 笨鳥慢飛 的回复内容:笨鳥丟出一個題目給大家思考 竟然沒人敢參與討論 那我后續怎還寫得下去
--------------------------------------------------------------------------------
1、笨鳥慢飛说,“竟然沒人敢參與討論”,其实是因为笨鳥慢飛的发言“东一榔头,西一棒捶”,只有笨鳥慢飛自己明白;
2、我来梳理一下笨鳥慢飛的发言:
1)编码器的输出脉冲的波形和频率,会因伺服电机的速度而变化,这就是笨鳥慢飛说的编码器的频宽;
2)伺服电机的工作状态,有高速和低速,要用不同频宽的编码器;
3)举例说,编码器的输出脉冲波形,在低速时是方波,在高速时就不是方波了,更高速时就什么也不是了,无法分辨了;
4)高解析度的编码器,适宜低速运行的电机;
3、我们在调试伺服电机时,速度高低变化,编码器输出的脉冲波形会发生很大的变化,会使脉冲处理电路失态、失效;
4、在很多情况下,只要伺服电机有那么几秒高速运行,甚至有1秒的飞车运行,就足以使位置闭环颠覆!
引用 笨鳥慢飛 的回复内容:
……以下这图 可以看出法兰克FANUC 两个磁式编码器的架构 一個編碼器是方波的 另一個就是弦波的編碼器 方波做為車牙用 旋波做為C軸定位用 許多客戶都異想天開 我想用一顆編碼器 來處理C軸及主軸定位功能 那是不可能 關鍵不在編碼器而是在數控器上 或驅動器的接口及頻寬的限制
--------------------------------------------------------------------------------
1、这句话的意思是,由于电机的运行速度在两个区段,需要配不同频宽的编码器;
2、这样就出现同一个电机在做“車牙用”和 “C軸定位用”两个不同频宽的编码器;
3、不可能用一个编码器,否则会出现一种运行正常,而另一种运行异常的情况;
4、这个情况过去被大家称为“干扰”,实际是编码器的缺陷造成的!
[此贴子已经被作者于2013/3/2 11:32:07编辑过]


