发表于:2012/12/24 12:27:07
#0楼
宋先生v
伺服电机的位置控制,转矩控制,速度控制是什么样的一个模式,有什么不同?
能帮忙解释下吗,谢谢
![附件]()
楼主问:例如位置控制模式,他工作的时候是不是PLC发脉冲的时候开始转动,然后plc一直发脉冲,伺服就一直走,PLC脉冲停止的时候伺服电机就停止转动?还是怎么样工作呢?
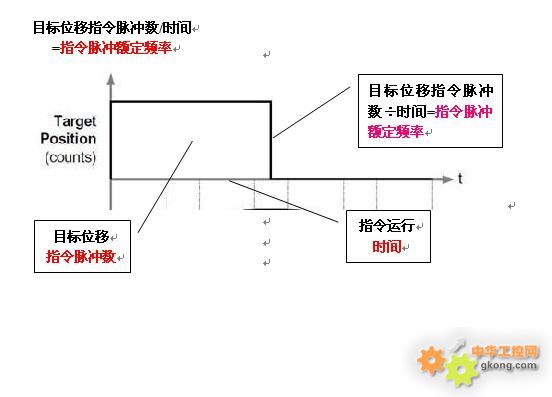
1、上图就是由用户设定的指令脉冲数的图;
2、用户根据工件实际需要移动的距离,和自己选定的脉冲当量,首先计算出伺服应该转动多少个指令脉冲数,就到达指定位置;
3、然后用户根据“PLC发脉冲额定频率例如200KHZ”,知道指令脉冲额定频率,并根据指令脉冲数计算出指令运算时间,得到上图设定曲线;
4、这个曲线在伺服还没有运行前,由用户设定的曲线;
5、这条曲线设定后,伺服就知道指令脉冲额定频率,知道伺服电机的上限运行速度
伺服上线运行速度=指令脉冲额定频率×伺服上限速度
6、有了这条曲线,伺服就知道用户要它要转过多少个指令脉冲数,到转过这么多指令脉冲数时,伺服就指令伺服停车;
7、当你设定好这个曲线后,启动伺服运转,伺服就开始启动、加速、匀速……转动起来了;
8、这时候没有“PLC发脉冲”,谁也没有发脉冲,指令脉冲只是个“数”!
9、那为什么大家说“PLC 发脉冲”,那是因为位置环就是PLC的计数器,那个指令脉冲数就是给计数器设定的一个基数;
10、PLC并不发脉冲,没有实际存在的脉冲,只有一个脉冲数,当然没有指令脉冲受干扰的问题!
![图]()
1、这个曲线是可以用示波器观察到的曲线;
2、它是伺服运转时编码器检测发出的反馈脉冲数,以及反馈脉冲数的频率曲线;
3、这条曲线也可以看成伺服运转的速度曲线,因为
编码器反馈脉冲的频率=编码器周反馈脉冲数×伺服电机速度(r/s)
4、这条曲线,反映了伺服运转的全过程,启动→加速→匀速→减速→停车,伺服的运动是一大步完成的。
5、这条曲线与横轴时间所围成的面积就是伺服运动全过程编码器的反馈脉冲数;
6、编码器的反馈脉冲数/电子齿轮比=指令脉冲数时,PLC计数器发出停车信号,驱动器停车!
7、这就是伺服运动控制的核心原理!!!
8、这个过程就是位置环的工作原理,或者说是PLC计数器的工作过程,指令脉冲为计数器基数,编码器反馈脉冲进入计数器计数端,当输出指令脉冲数“编码器的反馈脉冲数/电子齿轮比-指令脉冲数时=0”时,伺服停车!
9、仔细观察这条曲线,编码器反馈脉冲频率的最大值,对应的就是伺服运转的最大速度;
10、这个最大速度必须小于伺服电机的上限速度,也就是说这个曲线的高度要比指令脉冲曲线的高度“矮”;
11、这一点很重要,如果伺服运转速度,在某一个时刻“超速”,就会出现反馈脉冲丢失或者指令脉冲增多的故障!
12、仔细观察这条曲线,伺服停车前要减速,伺服停车必须在速度缓慢的情况下完成;
13、这一点非常重要,如果伺服停车时,伺服速度大,那么伺服惯性大,就不能准停,就会向前继续惯性转一下,出现编码器反馈脉冲数大于指令脉冲数的情况;
14、仔细观察这条曲线,伺服运转的最大速度是可以由用户设置的;
15、用户在速度环上设定编码器反馈脉冲频率,伺服的运转速度就是
设定编码器反馈脉冲频率=编码器周反馈脉冲数×伺服电机设定速度(r/s)
16、因为
指令脉冲频率=编码器反馈脉冲频率/电子齿轮比
所以,用户也可以设定“指令脉冲频率”,来设定伺服电机速度;
17、仔细观察这条曲线,伺服电机的加速、减速,就是靠驱动器变频、变压的速度环完成的,所需要的动力转矩是由电流环完成的,这就是ShowMotion 说的,“位置环可以包含速度环,也可以直接包含力矩环”!
18、在伺服停车时,伺服停车可以不停电,电流在零频时保持,即所谓的停车“锁定”!
19、如果停车不停电,必须在停车时零频,并能将零频时的电流保持;
20、如果停车不停电,停车时的零频位置可能会偏离停车指令位置,表现出位置环输出脉冲数不为零,或左右摆动!
伺服电机的位置控制,转矩控制,速度控制是什么样的一个模式,有什么不同?
能帮忙解释下吗,谢谢
楼主问:例如位置控制模式,他工作的时候是不是PLC发脉冲的时候开始转动,然后plc一直发脉冲,伺服就一直走,PLC脉冲停止的时候伺服电机就停止转动?还是怎么样工作呢?
1、上图就是由用户设定的指令脉冲数的图;
2、用户根据工件实际需要移动的距离,和自己选定的脉冲当量,首先计算出伺服应该转动多少个指令脉冲数,就到达指定位置;
3、然后用户根据“PLC发脉冲额定频率例如200KHZ”,知道指令脉冲额定频率,并根据指令脉冲数计算出指令运算时间,得到上图设定曲线;
4、这个曲线在伺服还没有运行前,由用户设定的曲线;
5、这条曲线设定后,伺服就知道指令脉冲额定频率,知道伺服电机的上限运行速度
伺服上线运行速度=指令脉冲额定频率×伺服上限速度
6、有了这条曲线,伺服就知道用户要它要转过多少个指令脉冲数,到转过这么多指令脉冲数时,伺服就指令伺服停车;
7、当你设定好这个曲线后,启动伺服运转,伺服就开始启动、加速、匀速……转动起来了;
8、这时候没有“PLC发脉冲”,谁也没有发脉冲,指令脉冲只是个“数”!
9、那为什么大家说“PLC 发脉冲”,那是因为位置环就是PLC的计数器,那个指令脉冲数就是给计数器设定的一个基数;
10、PLC并不发脉冲,没有实际存在的脉冲,只有一个脉冲数,当然没有指令脉冲受干扰的问题!
1、这个曲线是可以用示波器观察到的曲线;
2、它是伺服运转时编码器检测发出的反馈脉冲数,以及反馈脉冲数的频率曲线;
3、这条曲线也可以看成伺服运转的速度曲线,因为
编码器反馈脉冲的频率=编码器周反馈脉冲数×伺服电机速度(r/s)
4、这条曲线,反映了伺服运转的全过程,启动→加速→匀速→减速→停车,伺服的运动是一大步完成的。
5、这条曲线与横轴时间所围成的面积就是伺服运动全过程编码器的反馈脉冲数;
6、编码器的反馈脉冲数/电子齿轮比=指令脉冲数时,PLC计数器发出停车信号,驱动器停车!
7、这就是伺服运动控制的核心原理!!!
8、这个过程就是位置环的工作原理,或者说是PLC计数器的工作过程,指令脉冲为计数器基数,编码器反馈脉冲进入计数器计数端,当输出指令脉冲数“编码器的反馈脉冲数/电子齿轮比-指令脉冲数时=0”时,伺服停车!
9、仔细观察这条曲线,编码器反馈脉冲频率的最大值,对应的就是伺服运转的最大速度;
10、这个最大速度必须小于伺服电机的上限速度,也就是说这个曲线的高度要比指令脉冲曲线的高度“矮”;
11、这一点很重要,如果伺服运转速度,在某一个时刻“超速”,就会出现反馈脉冲丢失或者指令脉冲增多的故障!
12、仔细观察这条曲线,伺服停车前要减速,伺服停车必须在速度缓慢的情况下完成;
13、这一点非常重要,如果伺服停车时,伺服速度大,那么伺服惯性大,就不能准停,就会向前继续惯性转一下,出现编码器反馈脉冲数大于指令脉冲数的情况;
14、仔细观察这条曲线,伺服运转的最大速度是可以由用户设置的;
15、用户在速度环上设定编码器反馈脉冲频率,伺服的运转速度就是
设定编码器反馈脉冲频率=编码器周反馈脉冲数×伺服电机设定速度(r/s)
16、因为
指令脉冲频率=编码器反馈脉冲频率/电子齿轮比
所以,用户也可以设定“指令脉冲频率”,来设定伺服电机速度;
17、仔细观察这条曲线,伺服电机的加速、减速,就是靠驱动器变频、变压的速度环完成的,所需要的动力转矩是由电流环完成的,这就是ShowMotion 说的,“位置环可以包含速度环,也可以直接包含力矩环”!
18、在伺服停车时,伺服停车可以不停电,电流在零频时保持,即所谓的停车“锁定”!
19、如果停车不停电,必须在停车时零频,并能将零频时的电流保持;
20、如果停车不停电,停车时的零频位置可能会偏离停车指令位置,表现出位置环输出脉冲数不为零,或左右摆动!
[此贴子已经被作者于2012/12/24 17:57:01编辑过]