














发表于:2012/12/13 13:17:59
#0楼
伺服电机控制大型圆盘转动
1、转盘直径2.5米,总质量大概2吨,轴承支撑转动;2、转盘中心连接一轴延伸到下端,套齿轮;3、伺服电机+40比减速,减速机轴套齿轮,带动转盘下齿轮,(齿轮与齿轮减速比4:1)联动转盘;4、转盘5秒内做一往复圆周运动。请问:电机多大比较适合;伺服控制定位要注意哪些问题。跪谢。
1、转动惯量因为你没有说转盘的形状,我按质量均匀分布转盘惯量计算
J=1/2Mr^2=0.5×2000×1.25×1.25=1560Kgm^2
2、“转盘5秒内做一往复圆周运动”,是往返1周:
1)匀加速、匀减速对称,电动机电动、发电功率相同,正转和反转相同,这样5秒的正反转1周可以看成
0.5周/1.25秒×4;
2)由于角位移θ、角加速度β、时间t的关系是:
![附件]()
3)转矩T、角加速度β、转动惯量J的关系是:
T=Jβ
4)所以拖动转盘的转矩T为
![附件]()
5)将θ=π、t=1.25秒、J=1560Kgm^2代入得
T=1560Kgm^2×2π/(1.25秒)^2
=6240Nm
3、拖动圆盘的功率
1) p=Tω
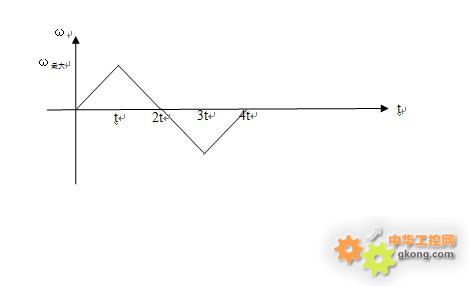
2)由于ω是由零到最大匀加速或匀减速运转的,所以电机的功率由零到最大再到零均匀变化;
3)最大角速度ω=βt=2θ/t=2π/1.25=5弧度/秒
4)所以拖动圆盘的最大功率Pm
Pm=Tω=6240Nm×5弧度/秒=31200w=31.2KW
4、如果系统的机械效率是1,那么电机运行的最大功率是31.2KW;
5、电机的功率基本定下来了,电机的额定转矩、额定转速,与系统机械转动比有关系:
1)如果电机直接拖动圆盘,那么电机的额定转矩T=6240Nm;
2)如果电机直接拖动圆盘,那么电机的速度是由零到最大变速运动:
最大速度=最大角速度ω=βt=2θ/t=2π/1.25=5弧度/秒=0.83转/秒=50转/min;
3)如果传动比是10,那么电机的额定转矩就是6240Nm÷10,最大转速是50转/min×10;
4)传动比由你设计,电机功率一定,最大功率是31.2KW,电机转速、额定转矩由传动比换算;
1、拖动转盘的转矩T为
![附件]()
1)θ为往返一个角位移的1/2:
例如往返一周,θ=π;
例如往返半周,θ=π/2
2)t为往返一个角位移所需要的时间的1/4:
例如往返一周5秒,则t=5/4秒=1.25秒;
例如往返一周10秒,则t=10/4秒=2.5秒;
3)J为圆盘转动惯量,可根据其几何形状套用不同的公式计算之;
2、这个公式是把圆盘往返一个运动周期的运动分成正转加速、正传减速、反转加速、反转减速4个完全对称的分段运动,认为它们具有相同大小的转矩T、相同大小的角加速度β、相等的时间t
![附件]()
3、转矩T确定,最大转速ω×转矩T=电机的最大功率;
其中最大转速ω=βt=2θ/t
4、如果传动效率是1,可认为直接拖动圆盘的功率=电机不同传动比时的功率
5、计算结果可以根据系统传动方式及其损耗对计算结果进行修正:
6、传动比只是改变了动力转矩和动力的角速度,不改变动力的功率,这就是杠杆原理;
7、电机的额定转矩、额定转速与传动比有关,其乘积额定功率不变;
例如
电机直接拖动额定转速是50转/分,你可以选择传动比60,电机额定速度是
50×60=3000转/分;
这时电机的额定转矩6240Nm÷60=104Nm,
而电机的额定功率还是31.2KW不变;
对你的系统一点儿建议:
1、建议你的系统采用:
PLC+位置开关+变频器
2、正反转加减速由变频器完成;
3、正反转往复运动控制由位置触点开关+PLC来完成;
4、这样系统非常简单明了安全可靠,运行调试十分方便!
![附件]()
![附件]()
![附件]()
![附件]()
1、转盘直径2.5米,总质量大概2吨,轴承支撑转动;2、转盘中心连接一轴延伸到下端,套齿轮;3、伺服电机+40比减速,减速机轴套齿轮,带动转盘下齿轮,(齿轮与齿轮减速比4:1)联动转盘;4、转盘5秒内做一往复圆周运动。请问:电机多大比较适合;伺服控制定位要注意哪些问题。跪谢。
1、转动惯量因为你没有说转盘的形状,我按质量均匀分布转盘惯量计算
J=1/2Mr^2=0.5×2000×1.25×1.25=1560Kgm^2
2、“转盘5秒内做一往复圆周运动”,是往返1周:
1)匀加速、匀减速对称,电动机电动、发电功率相同,正转和反转相同,这样5秒的正反转1周可以看成
0.5周/1.25秒×4;
2)由于角位移θ、角加速度β、时间t的关系是:
3)转矩T、角加速度β、转动惯量J的关系是:
T=Jβ
4)所以拖动转盘的转矩T为
5)将θ=π、t=1.25秒、J=1560Kgm^2代入得
T=1560Kgm^2×2π/(1.25秒)^2
=6240Nm
3、拖动圆盘的功率
1) p=Tω
2)由于ω是由零到最大匀加速或匀减速运转的,所以电机的功率由零到最大再到零均匀变化;
3)最大角速度ω=βt=2θ/t=2π/1.25=5弧度/秒
4)所以拖动圆盘的最大功率Pm
Pm=Tω=6240Nm×5弧度/秒=31200w=31.2KW
4、如果系统的机械效率是1,那么电机运行的最大功率是31.2KW;
5、电机的功率基本定下来了,电机的额定转矩、额定转速,与系统机械转动比有关系:
1)如果电机直接拖动圆盘,那么电机的额定转矩T=6240Nm;
2)如果电机直接拖动圆盘,那么电机的速度是由零到最大变速运动:
最大速度=最大角速度ω=βt=2θ/t=2π/1.25=5弧度/秒=0.83转/秒=50转/min;
3)如果传动比是10,那么电机的额定转矩就是6240Nm÷10,最大转速是50转/min×10;
4)传动比由你设计,电机功率一定,最大功率是31.2KW,电机转速、额定转矩由传动比换算;
1、拖动转盘的转矩T为
1)θ为往返一个角位移的1/2:
例如往返一周,θ=π;
例如往返半周,θ=π/2
2)t为往返一个角位移所需要的时间的1/4:
例如往返一周5秒,则t=5/4秒=1.25秒;
例如往返一周10秒,则t=10/4秒=2.5秒;
3)J为圆盘转动惯量,可根据其几何形状套用不同的公式计算之;
2、这个公式是把圆盘往返一个运动周期的运动分成正转加速、正传减速、反转加速、反转减速4个完全对称的分段运动,认为它们具有相同大小的转矩T、相同大小的角加速度β、相等的时间t
3、转矩T确定,最大转速ω×转矩T=电机的最大功率;
其中最大转速ω=βt=2θ/t
4、如果传动效率是1,可认为直接拖动圆盘的功率=电机不同传动比时的功率
5、计算结果可以根据系统传动方式及其损耗对计算结果进行修正:
6、传动比只是改变了动力转矩和动力的角速度,不改变动力的功率,这就是杠杆原理;
7、电机的额定转矩、额定转速与传动比有关,其乘积额定功率不变;
例如
电机直接拖动额定转速是50转/分,你可以选择传动比60,电机额定速度是
50×60=3000转/分;
这时电机的额定转矩6240Nm÷60=104Nm,
而电机的额定功率还是31.2KW不变;
对你的系统一点儿建议:
1、建议你的系统采用:
PLC+位置开关+变频器
2、正反转加减速由变频器完成;
3、正反转往复运动控制由位置触点开关+PLC来完成;
4、这样系统非常简单明了安全可靠,运行调试十分方便!
[此贴子已经被作者于2012/12/13 13:23:20编辑过]

