返回工控网首页
|
| 添加到收藏夹
中国自动化学会专家咨询工作委员会指定宣传媒体
免费注册
广告服务
|
客服中心
您现在所在的是:
运动控制
工控论坛首页
→
运动控制
→ 浏览主题:
【话题】这个运动如何实现(20120427)
回帖:
18
个,阅读:
1356
次
[上一页]
[1]
[2]
[下一页]
* 帖子主题:
【话题】这个运动如何实现(20120427)
收藏
分享到
818
feizhoushiye
文章数:
4
年度积分:
50
历史总积分:
818
作者的所有帖子(4)
注册时间:
2011/9/3
发站内信
发表于:2012/4/26 8:35:55
#0楼
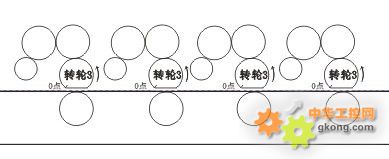
转轮转速每分钟在50-100转,四个转轮3的0点完全一致,精确为正负0.05毫米,请教各位老师,这个看似简单的东东,如何做到的
[此贴子已经被jint于2012/4/28 9:42:00编辑过]
【方案】
BL20经济型产品在港口的应用
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
结帖
|
管理
匿名用户
文章数:
N/A
年度积分:
0
历史总积分:
0
作者的所有帖子
注册时间:
2005/5/2
发站内信
发表于:2012/4/26 9:12:14
#1楼
该用户被锁定,回复内容不予显示!
【方案】
人机、变频器、伺服在塑料封切机上的应用
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
24374
产品体验中心会员
wushulin
版主
文章数:
6182
年度积分:
154
历史总积分:
24374
作者的所有帖子(6182)
注册时间:
2006/2/17
发站内信
2018论坛优秀版主
2017论坛优秀版主
2016论坛优秀版主
2015论坛优秀版主
2014论坛优秀版主
西门子PLC体验(一)
我秀我做2014
2013论坛优秀版主
秀秀我的办公桌
晒工控工具书
2012论坛优秀版主
2011国庆活动
2010年度论坛贡献奖
发表于:2012/4/26 13:02:03
#2楼
如果在同一条线上,建议采用机械转动。如果距离不是特别大,可以用同步带做。
不要动不动就是用电气控制,电气控制在很时候很难的。
汽车车桥生产在线检测设备;其它大批量零件生产过程检测,
承接:非标自动化设备设计、旧设备改良与维修; 单独非标项目合作。
【方案】
FLIR GF343可视化二氧化碳,助力研究让手术室更安全!
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
818
feizhoushiye
文章数:
4
年度积分:
50
历史总积分:
818
作者的所有帖子(4)
注册时间:
2011/9/3
发站内信
发表于:2012/4/26 18:35:40
#3楼
以下是引用
wushulin在2012/4/26 13:02:03
的发言:
如果在同一条线上,建议采用机械转动。如果距离不是特别大,可以用同步带做。
不要动不动就是用电气控制,电气控制在很时候很难的。
吴工,经常拜读你的帖子,感触很深,采用机械转动的话,是一个不错的主意,但是四个转轮经常需要根据产品的大小来调整转轮距离,采用键轴传动,制造工艺及复杂性可想而知,如果用伺服电机难度也非常大,这个设备其实是用在冲床上,但这个东西采用机械转动,和伺服电机都不容易
【方案】
紧凑型FLIR红外热像仪,实现全新的状态监控
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1428
wfs040
文章数:
96
年度积分:
50
历史总积分:
1428
作者的所有帖子(96)
注册时间:
2011/9/16
发站内信
发表于:2012/4/26 22:21:21
#4楼
采用涡轮蜗杆机构,蜗杆设计成滑键式四位滑动,这样驱动的时候能够保证四轮同步10道公差,并且蜗杆设计为多头蜗杆保证转速和速度控制。1T6的精度,模数不要太大,工艺要求就不说了。以上只能保证四个轮子同步和公差,无法保证工件的输送过程中的跑偏,因为对于位置公差要求严格的工件进给必须是线性的进给,不可以用传动输送,传动输送只能用于二自由的输送,因为棍子两端的直径公差,棍子的中心线和进给轴线的垂直度公差,轴承公差等等都是跑偏的主要因素,即使1T3的精度也根本无法控制跑偏。另外如果是金属工件在冲压时会产生应力作用下的位移,这时棍子是无法阻止位移的。
[此贴子已经被作者于2012/4/27 20:43:29编辑过]
【方案】
图尔克分布式自动化在药品包装的应用
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1832
gushunyi
文章数:
331
年度积分:
50
历史总积分:
1832
作者的所有帖子(331)
注册时间:
2006/1/9
发站内信
发表于:2012/4/26 22:55:19
#5楼
难度大啊,我们送料机也不能说5丝啊,连续必须加放松,消除累积误差,叫模具想办法。
【方案】
嵌入式与AIOT:华北工控基于RK3588芯片的嵌入式产品方案
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
726
产品体验中心会员
chen-daiyuan
文章数:
139
年度积分:
50
历史总积分:
726
作者的所有帖子(139)
注册时间:
2012/2/3
发站内信
发表于:2012/4/26 23:08:25
#6楼
顶一下
【方案】
红外热成像技术为房屋损坏评估提供图像细节增强
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
818
feizhoushiye
文章数:
4
年度积分:
50
历史总积分:
818
作者的所有帖子(4)
注册时间:
2011/9/3
发站内信
发表于:2012/4/27 8:08:51
#7楼
以下是引用
wfs040在2012/4/26 22:21:21
的发言:
采用涡轮蜗杆机构,蜗杆设计成滑键式四位滑动,这样驱动的时候能够保证四轮同步10道公差,并且蜗杆设计为多头蜗杆保证转速和速度控制。1T6的精度,模数不要太大,工艺要求就不说了。
昨天通过“吴工”提醒,也是想的这个方法,不过没有考虑的这么详细,更没有精度的范围,通过您提供的精度参数,非常感谢,会以这个精度为参数来考虑设计方案
【方案】
使用倍福系统实现银行机房环境监控
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
6344
zhengchang
文章数:
1820
年度积分:
50
历史总积分:
6344
作者的所有帖子(1820)
注册时间:
2011/5/6
发站内信
发表于:2012/4/27 8:32:00
#8楼
同步带也可以调节距离的。增加过渡轮
【方案】
华北工控嵌入式AI主板定制化方案,赋能无人机产业创新发展
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
10914
viptda2005
文章数:
6371
年度积分:
50
历史总积分:
10914
作者的所有帖子(6371)
注册时间:
2007/6/13
发站内信
发表于:2012/4/27 8:39:06
#9楼
4个轮子精度要求0.05毫米,老老实实用伺服电机吧,同步带否认得远远的
【方案】
行业应用 | 三菱电机与汽车制造的进化之路
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
工控学堂推荐视频:
PLC学习视频
变频器学习视频
西门子学习视频
三菱学习视频
更多学习视频>>
•
[视频课程]电工进阶电气工程师的一百种可能
•
[视频课程]你还不会电机正反转电路吗
•
[视频课程]三节课掌握星三角程序编写
•
[视频课程]电工如何快速入门PLC
•
[视频课程]十年老电工实操系列之从小白到超越中级
•
[视频课程]低压电工考证实操教程之电机控制接线实操
•
[视频课程]应用中的电动机控制与保护元器件选择
•
[视频课程]老司机带你玩转电工仪器仪表
•
[视频课程]电工操作证实操--科目二
78.0005