发表于:2012/4/7 13:03:39
#0楼
伺服电子齿轮的设置
刘志斌 发表于 2012/4/6 0:24:23
szlixiangyang
发表于:2012-03-24 10:08:06 楼主
在设备电子齿轮时,需要知道脉冲当量(也就是一个脉冲所对应的进给量或角度数),那么这个脉冲当量该怎样计算?还是可以给定?在J2S的说明书上的例子中:伺服电机的脉冲分辨率是131072,机械一转的进给量是10mm,变速比为1:2,那么这脉冲当量是不是为10/131072*2得到的是0.038um,而给定的一个脉冲为10um的进给量? 有点疑惑。请指教!
谢谢!
“那么这个脉冲当量该怎样计算?还是可以给定?”
1、楼主问,脉冲当量是给定的,还是计算的?
2、脉冲当量当然是与用户给定的,用户根据工艺需求的工件移动速度,决定每个指令脉冲的工件的进给量或者说位移量;
3、用户、控制器都要知道脉冲当量,然后根据给定目标位置,确定指令脉冲总数;
4、用户给定脉冲当量,还要根据脉冲当量计算出电子齿轮比,在控制器上设定电子齿轮比;5、事实上,当电子齿轮比确定后,脉冲当量也就确定了:
脉冲当量=螺距/减速比×(编码器反馈脉冲/电子齿轮比)
=螺距×电子齿轮比/减速比×编码器反馈脉冲
6、也就是说,电子齿轮比确定后,脉冲当量是计算出来的;
7、所以笨鸟因此说,先确定脉冲当量会出“导因为果”的错误;
8、其实用户先给定脉冲当量,再确定电子齿轮比,也是正确的,不会出任何错误:
电子齿轮比=编码器反馈脉冲/(螺距/减速比×脉冲当量)
“那么这脉冲当量是不是为10/131072*2得到的是0.038um,”
1、楼主问,“脉冲当量是不是为10/131072*2得到的是0.038um”?
2、脉冲当量= 10mm/2×131072=0.038um= 螺距×电子齿轮比/减速比×编码器反馈脉冲;(楼上5的公式)
3、楼主计算这个脉冲当量时,是在电子齿轮比=1的前提下计算的;
4、当电子齿轮比是其它值时,例如电子齿轮比=10时,脉冲当量就是0.38um;
当电子齿轮比是其它值时,例如电子齿轮比=100时,脉冲当量就是3.8um;
当电子齿轮比是其它值时,例如电子齿轮比=200时,脉冲当量就是7.6um;
5、这样有个明显的缺点,脉冲当量不是一个长度单位的最小单位,例如脉冲当量是1mm、0.1mm、0.001mm、0.0001mm、……
6、所以用户一般还是先确定脉冲当量,例如
1) 脉冲当量=0.0001mm
2)电子齿轮比=编码器反馈脉冲/(螺距/减速比×脉冲当量)(楼上8的公式)
=131072/(10mm/2×0.0001mm)
=131072/50000
=2.62144
3)这种计算有个缺点,电子齿轮比不是整数,很多情况下是个小数;
“给定的一个脉冲为10um的进给量? ”
1、楼主问,而“给定的一个脉冲为10um的进给量? ”,不是0.038um?!
2、当给定 脉冲当量=10um=0.01mm:
1) 脉冲当量=0.01mm
2)电子齿轮比=编码器反馈脉冲/(螺距/减速比×脉冲当量) (8楼的公式)
=131072/(10mm/2×0.01mm)
=131072/500
=262.144
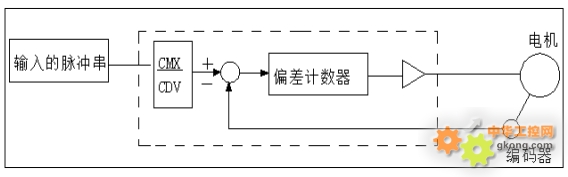
关于4倍频的问题:
1、因为指令脉冲进入控制器作为记数加脉冲,而编码器输入反馈脉冲作为记数减脉冲;
2、加脉冲和减脉冲记数可以有不同的输入端,也可以有不同脉冲波形;
3、当减脉冲需要尖峰脉冲(正的或负的)时,需要将编码器输出的正、余弦波形,先整理成方波,再通过微分电路转换成尖峰脉冲,这样一个正弦脉冲,就会变成4个尖峰脉冲,以适应尖脉冲技术的需要;
4、这个4倍频,是波形转换的需要,不是需要4 倍频,是需要将方波转换为尖峰脉冲的原因;
5、如果是这样,在计算电子齿轮比时、脉冲当量时,一定要叫将编码器输出的正、余弦波数乘以4;
关于脉冲当量:
1、脉冲当量只有一个,不会是两个;
2、脉冲当量由用户给定,是用户调整工件移动速度和进给量的需要而设置的一个平台;
3、脉冲当量确定后,再确定电子齿轮比,并进行电子齿轮比相关参数的设定;
4、脉冲当量与电子齿轮比是相关量,一个确定,另一个也必然确定;
5、脉冲当量或者电子齿轮比,是控制器根据控制目标位置进行脉冲数计算的主要依据;
6、这里要说明的是,脉冲当量、电子齿轮、4倍频的问题,因伺服的设计有很大差异,不拘一格,所以关于脉冲当量、电子齿轮、4倍频的问题,一定要以伺服说明书为准,不能套用,否则会出错!
关于这种伺服的一点看法:
1、这种伺服位置检测因编码器而准确;
2、当运动部件到达给定位置时,停机、启动等命令是准确的;
3、可是电机以及运动部件是否听从命令,响应是否及时,是这种伺服成败的关键;
4、就好像你知道准确数字,确在用粗调旋钮调整,永远调不到你要的精确位置上一样;
5、出现的故障,往往是在指定位置左右来回摆动;
6、操作对策,只能是在指定位置减速慢行,或者采用机械位置连锁制动措施;
刘志斌 发表于 2012/4/6 0:24:23
szlixiangyang
发表于:2012-03-24 10:08:06 楼主
在设备电子齿轮时,需要知道脉冲当量(也就是一个脉冲所对应的进给量或角度数),那么这个脉冲当量该怎样计算?还是可以给定?在J2S的说明书上的例子中:伺服电机的脉冲分辨率是131072,机械一转的进给量是10mm,变速比为1:2,那么这脉冲当量是不是为10/131072*2得到的是0.038um,而给定的一个脉冲为10um的进给量? 有点疑惑。请指教!
谢谢!
“那么这个脉冲当量该怎样计算?还是可以给定?”
1、楼主问,脉冲当量是给定的,还是计算的?
2、脉冲当量当然是与用户给定的,用户根据工艺需求的工件移动速度,决定每个指令脉冲的工件的进给量或者说位移量;
3、用户、控制器都要知道脉冲当量,然后根据给定目标位置,确定指令脉冲总数;
4、用户给定脉冲当量,还要根据脉冲当量计算出电子齿轮比,在控制器上设定电子齿轮比;5、事实上,当电子齿轮比确定后,脉冲当量也就确定了:
脉冲当量=螺距/减速比×(编码器反馈脉冲/电子齿轮比)
=螺距×电子齿轮比/减速比×编码器反馈脉冲
6、也就是说,电子齿轮比确定后,脉冲当量是计算出来的;
7、所以笨鸟因此说,先确定脉冲当量会出“导因为果”的错误;
8、其实用户先给定脉冲当量,再确定电子齿轮比,也是正确的,不会出任何错误:
电子齿轮比=编码器反馈脉冲/(螺距/减速比×脉冲当量)
“那么这脉冲当量是不是为10/131072*2得到的是0.038um,”
1、楼主问,“脉冲当量是不是为10/131072*2得到的是0.038um”?
2、脉冲当量= 10mm/2×131072=0.038um= 螺距×电子齿轮比/减速比×编码器反馈脉冲;(楼上5的公式)
3、楼主计算这个脉冲当量时,是在电子齿轮比=1的前提下计算的;
4、当电子齿轮比是其它值时,例如电子齿轮比=10时,脉冲当量就是0.38um;
当电子齿轮比是其它值时,例如电子齿轮比=100时,脉冲当量就是3.8um;
当电子齿轮比是其它值时,例如电子齿轮比=200时,脉冲当量就是7.6um;
5、这样有个明显的缺点,脉冲当量不是一个长度单位的最小单位,例如脉冲当量是1mm、0.1mm、0.001mm、0.0001mm、……
6、所以用户一般还是先确定脉冲当量,例如
1) 脉冲当量=0.0001mm
2)电子齿轮比=编码器反馈脉冲/(螺距/减速比×脉冲当量)(楼上8的公式)
=131072/(10mm/2×0.0001mm)
=131072/50000
=2.62144
3)这种计算有个缺点,电子齿轮比不是整数,很多情况下是个小数;
“给定的一个脉冲为10um的进给量? ”
1、楼主问,而“给定的一个脉冲为10um的进给量? ”,不是0.038um?!
2、当给定 脉冲当量=10um=0.01mm:
1) 脉冲当量=0.01mm
2)电子齿轮比=编码器反馈脉冲/(螺距/减速比×脉冲当量) (8楼的公式)
=131072/(10mm/2×0.01mm)
=131072/500
=262.144
关于4倍频的问题:
1、因为指令脉冲进入控制器作为记数加脉冲,而编码器输入反馈脉冲作为记数减脉冲;
2、加脉冲和减脉冲记数可以有不同的输入端,也可以有不同脉冲波形;
3、当减脉冲需要尖峰脉冲(正的或负的)时,需要将编码器输出的正、余弦波形,先整理成方波,再通过微分电路转换成尖峰脉冲,这样一个正弦脉冲,就会变成4个尖峰脉冲,以适应尖脉冲技术的需要;
4、这个4倍频,是波形转换的需要,不是需要4 倍频,是需要将方波转换为尖峰脉冲的原因;
5、如果是这样,在计算电子齿轮比时、脉冲当量时,一定要叫将编码器输出的正、余弦波数乘以4;
关于脉冲当量:
1、脉冲当量只有一个,不会是两个;
2、脉冲当量由用户给定,是用户调整工件移动速度和进给量的需要而设置的一个平台;
3、脉冲当量确定后,再确定电子齿轮比,并进行电子齿轮比相关参数的设定;
4、脉冲当量与电子齿轮比是相关量,一个确定,另一个也必然确定;
5、脉冲当量或者电子齿轮比,是控制器根据控制目标位置进行脉冲数计算的主要依据;
6、这里要说明的是,脉冲当量、电子齿轮、4倍频的问题,因伺服的设计有很大差异,不拘一格,所以关于脉冲当量、电子齿轮、4倍频的问题,一定要以伺服说明书为准,不能套用,否则会出错!
关于这种伺服的一点看法:
1、这种伺服位置检测因编码器而准确;
2、当运动部件到达给定位置时,停机、启动等命令是准确的;
3、可是电机以及运动部件是否听从命令,响应是否及时,是这种伺服成败的关键;
4、就好像你知道准确数字,确在用粗调旋钮调整,永远调不到你要的精确位置上一样;
5、出现的故障,往往是在指定位置左右来回摆动;
6、操作对策,只能是在指定位置减速慢行,或者采用机械位置连锁制动措施;