














发表于:2008/4/2 9:36:00
#0楼
大家好,请教一个PLC控制伺服电机的问题:
我是新手,问的比较白啊,大家体谅一下....
我比较不明白的是:
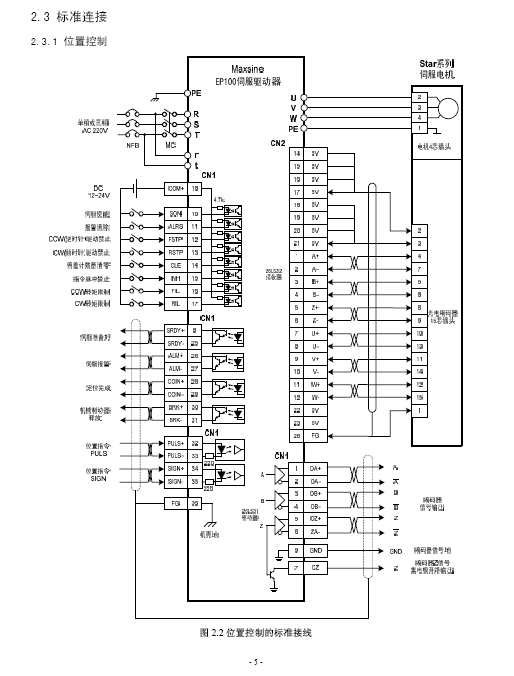
1.伺服驱动器怎么接线的?
我下载到的迈信ep100的交流驱动器说明书,里面有一个位置控制的接线图,![附件]() 可是我不怎么看得懂。
可是我不怎么看得懂。
因为我看到实际控制柜的PLC和伺服驱动器的连线只用了3根线,好像是伺服驱动器CN1端口的34(指令脉冲输入SIGN+)、35(脉冲指令输入SIGN-)、36(屏蔽地线FG)端子,也就是说实际控制信号只用了两根线。这也能控制吗?
2.还有个问题,可是突然想不起来了,先占个位子,以后补上
我是新手,问的比较白啊,大家体谅一下....
我比较不明白的是:
1.伺服驱动器怎么接线的?
我下载到的迈信ep100的交流驱动器说明书,里面有一个位置控制的接线图,
因为我看到实际控制柜的PLC和伺服驱动器的连线只用了3根线,好像是伺服驱动器CN1端口的34(指令脉冲输入SIGN+)、35(脉冲指令输入SIGN-)、36(屏蔽地线FG)端子,也就是说实际控制信号只用了两根线。这也能控制吗?
2.还有个问题,可是突然想不起来了,先占个位子,以后补上


