发表于:2023/11/25 21:13:22
#0楼
需求:加热控制。
现有的PLC:汇川最新的easy,PS:自带PID块,看不懂,。调不来。手册也是看的一愣一愣的;
![附件 1.jpg]()
![附件 2.jpg]()
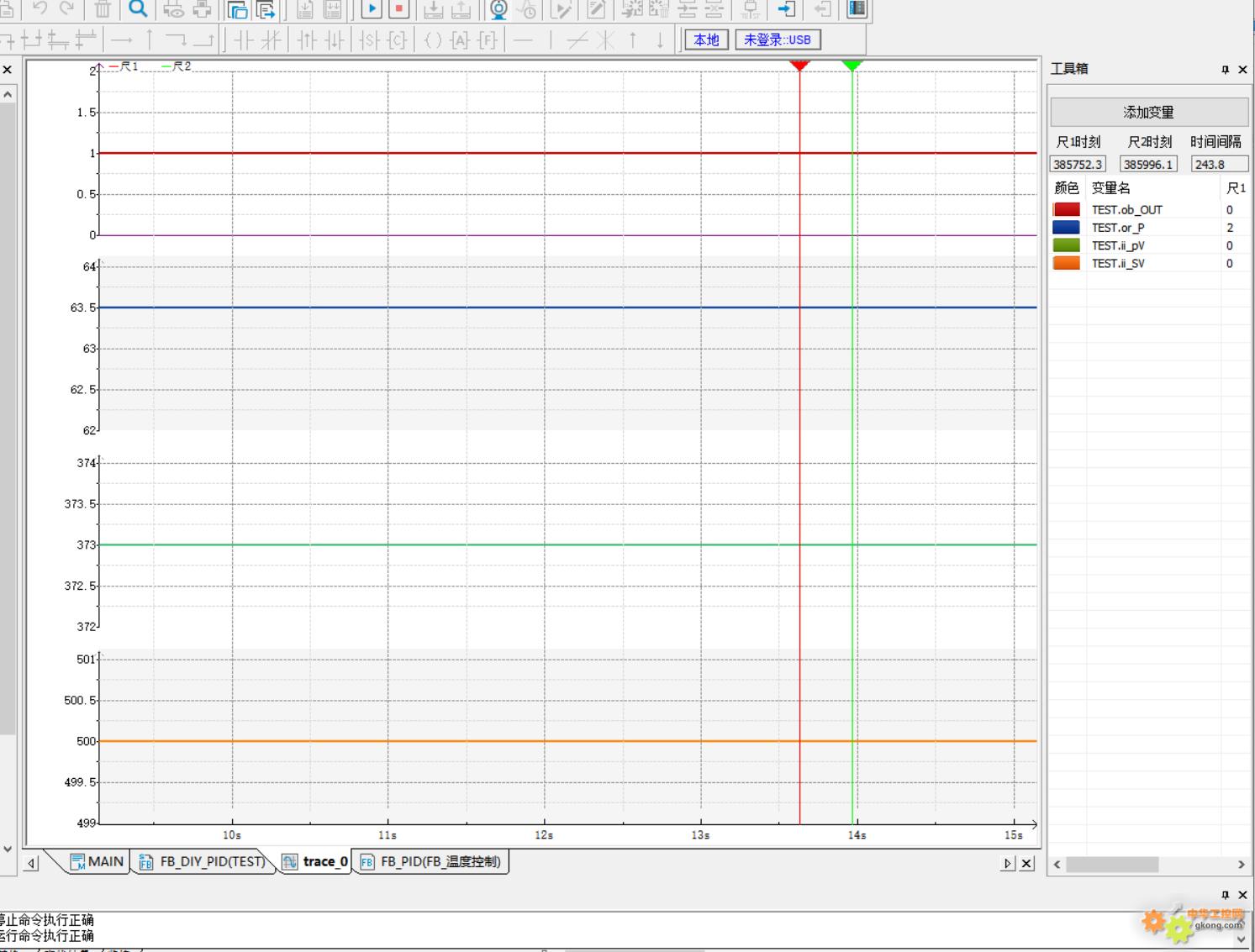
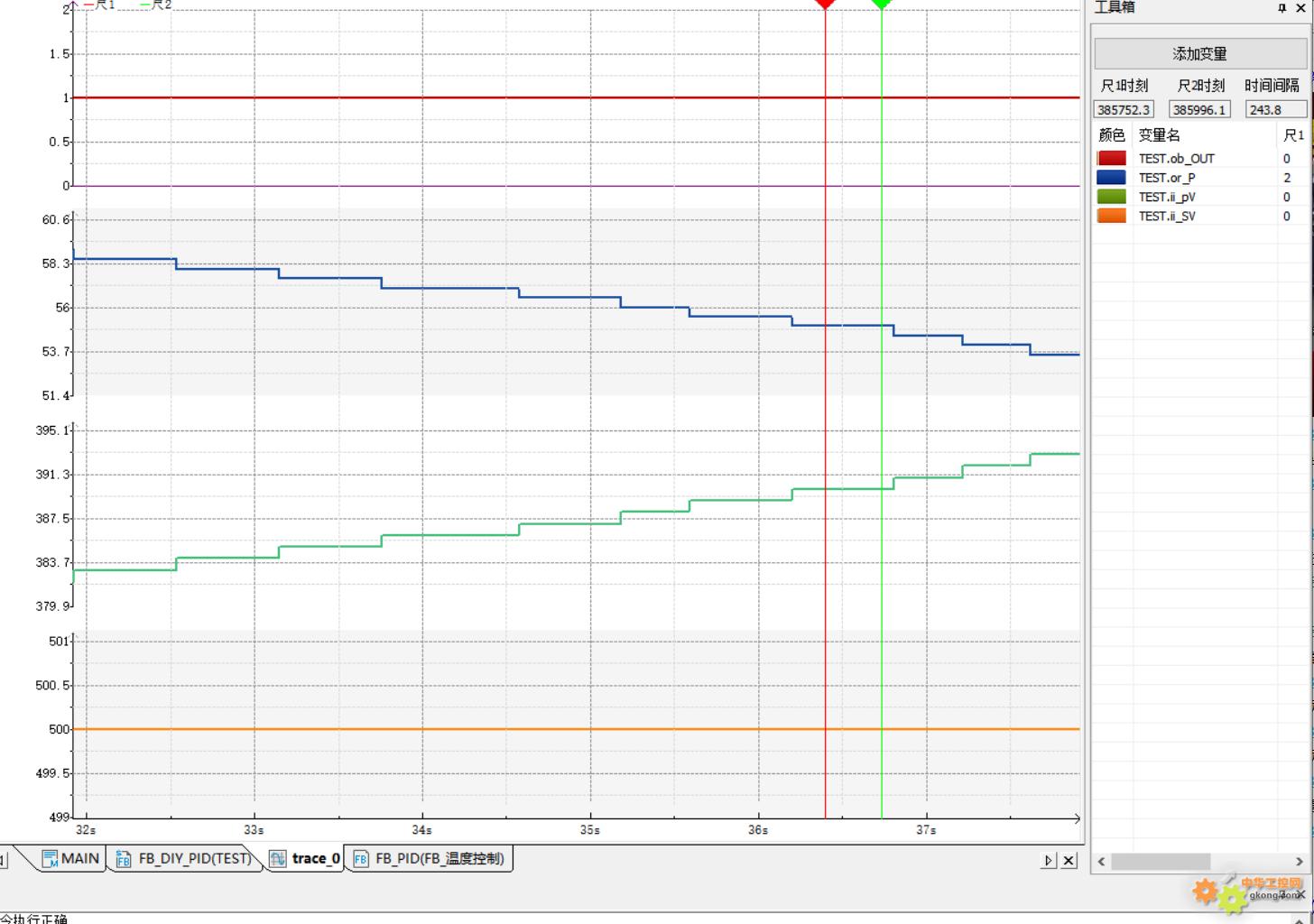
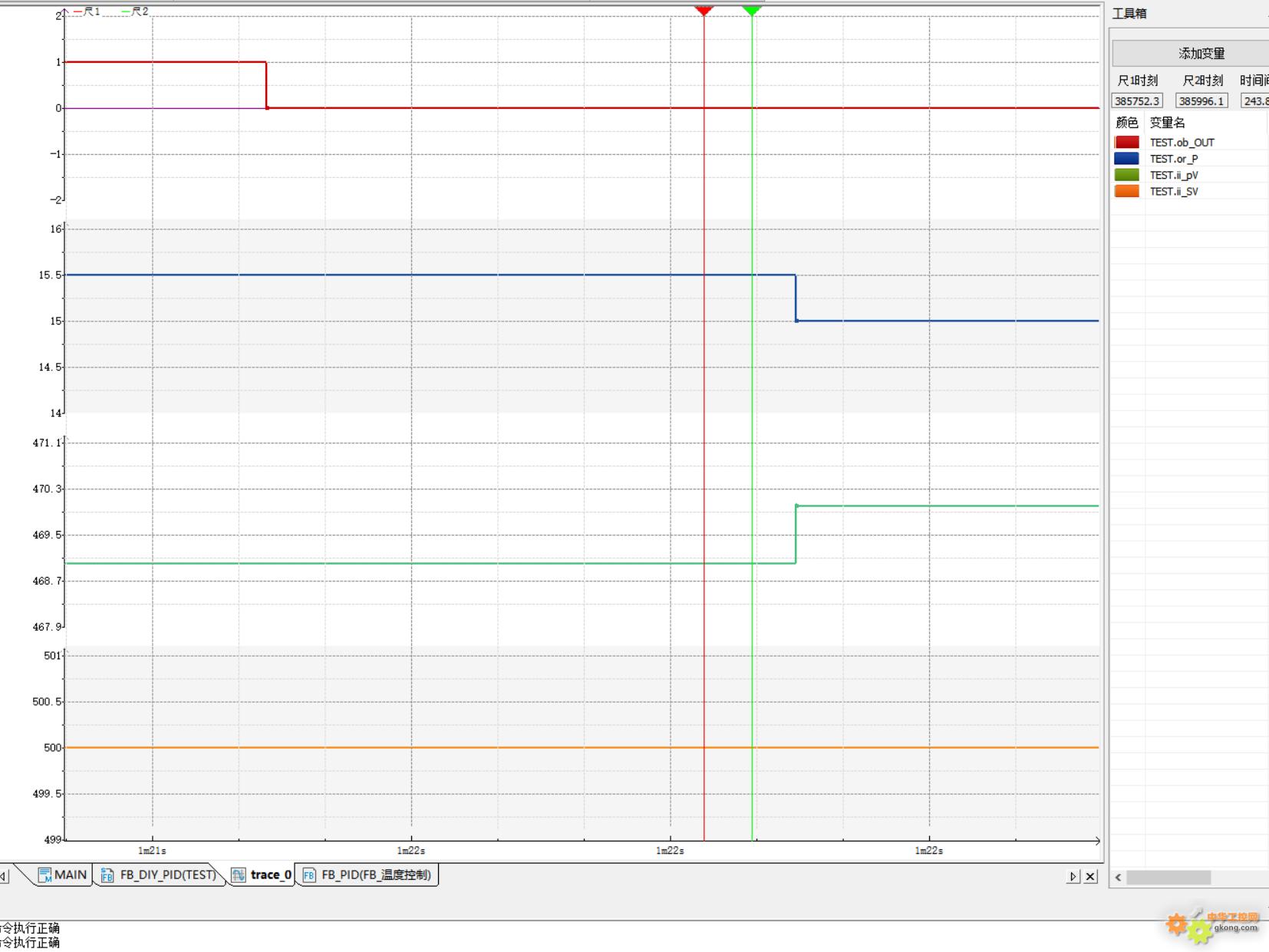
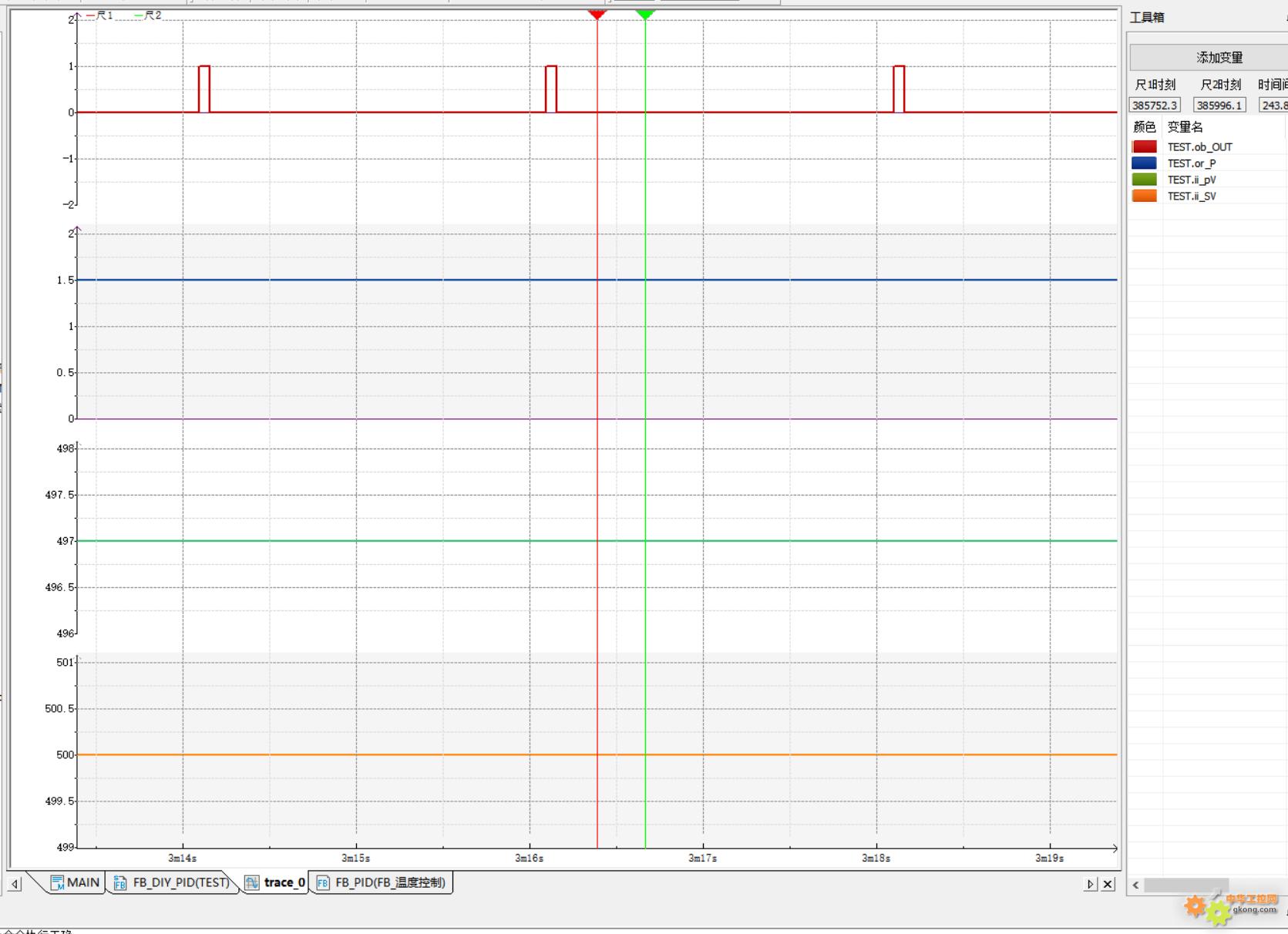
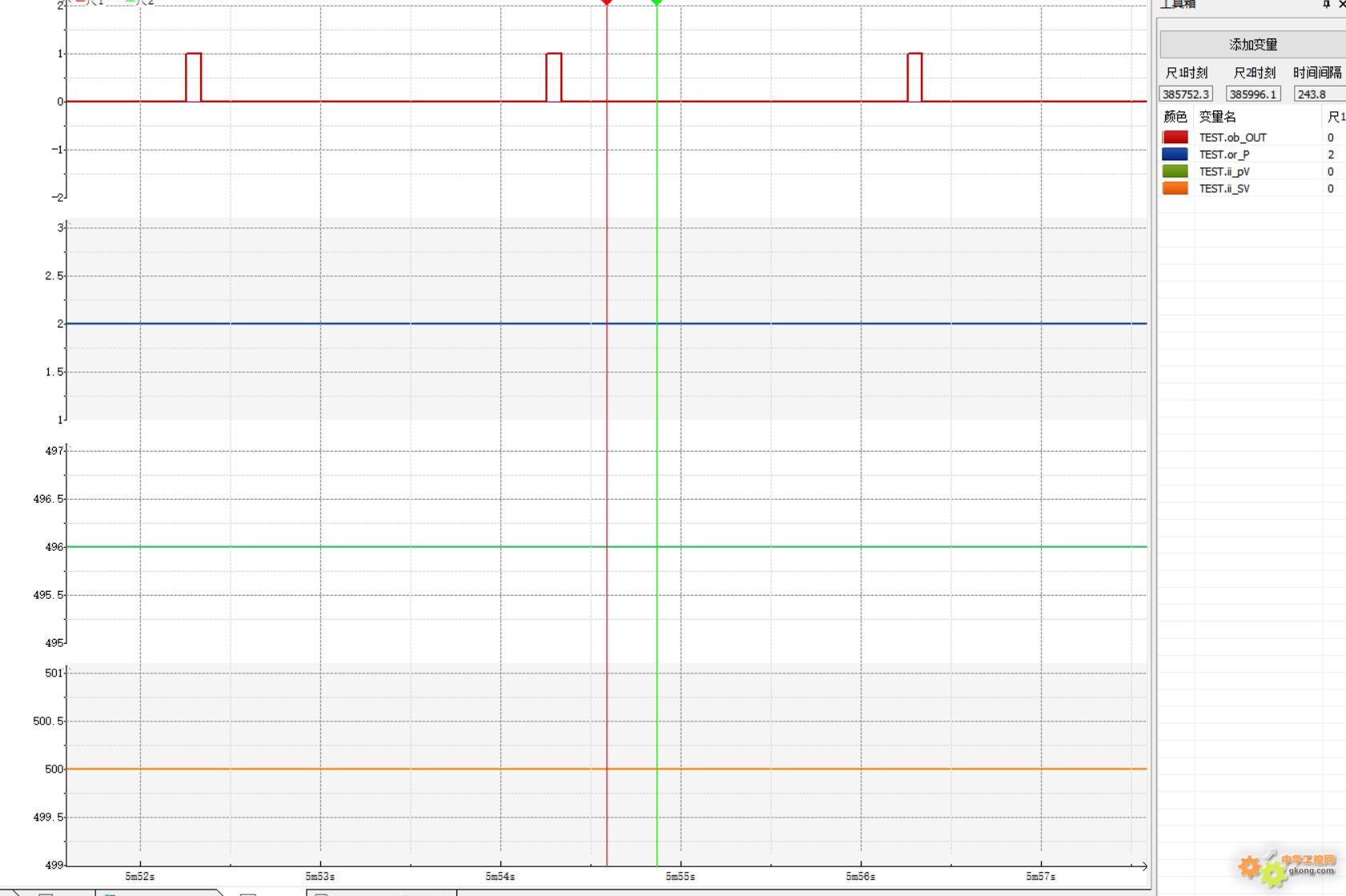
我测试了半天,感觉温度不是太准 (通讯读取温度,简易定时器+PID_OUT百分百=简易PWM输出Y点驱动继电器)。
程序就不上图了。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
因为不好用,自整定以后还是不行。、
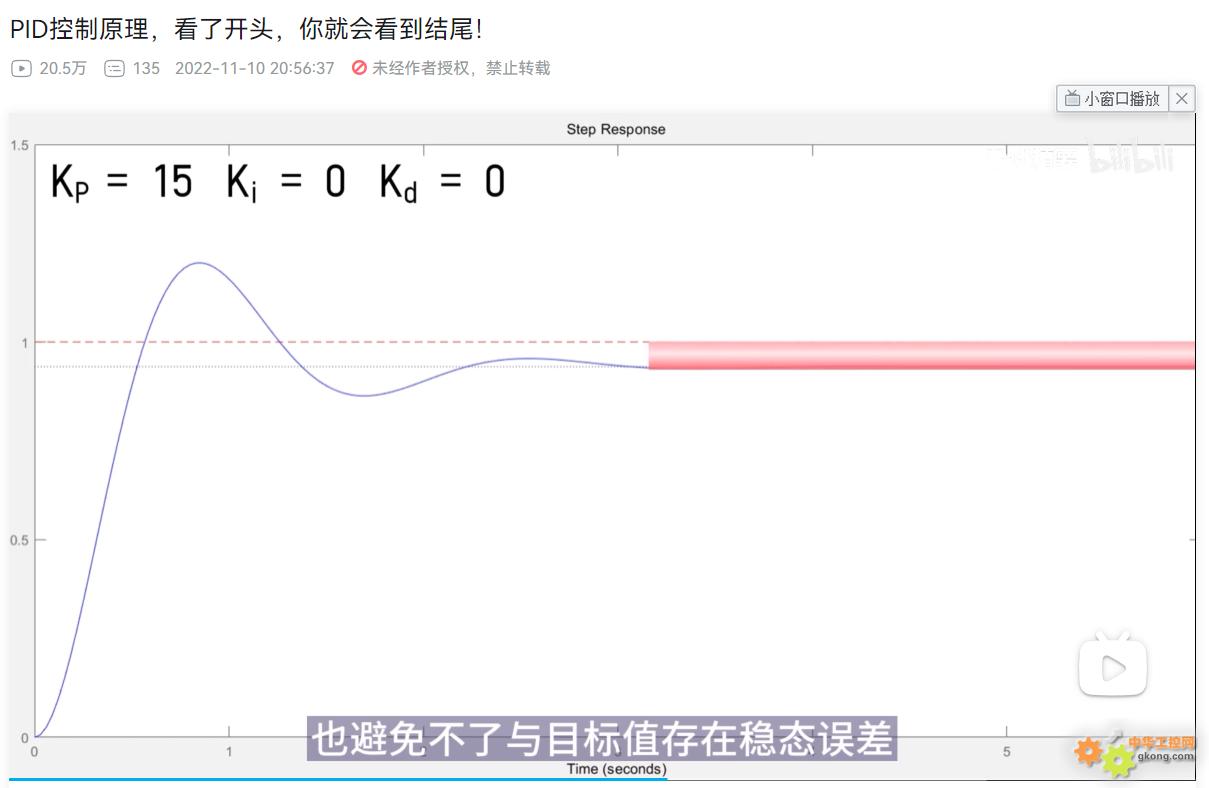
我就在作妖,网上一堆PID教程,解释,我们能不能自己写个PID呢?
~~~~~~~~
B站教程:
https://www.bilibili.com/video/BV1GD4y1x7bV/?spm_id_from=333.337.search-card.all.click&vd_source=30022844041d7d5382f84a14a828d1c7
~~
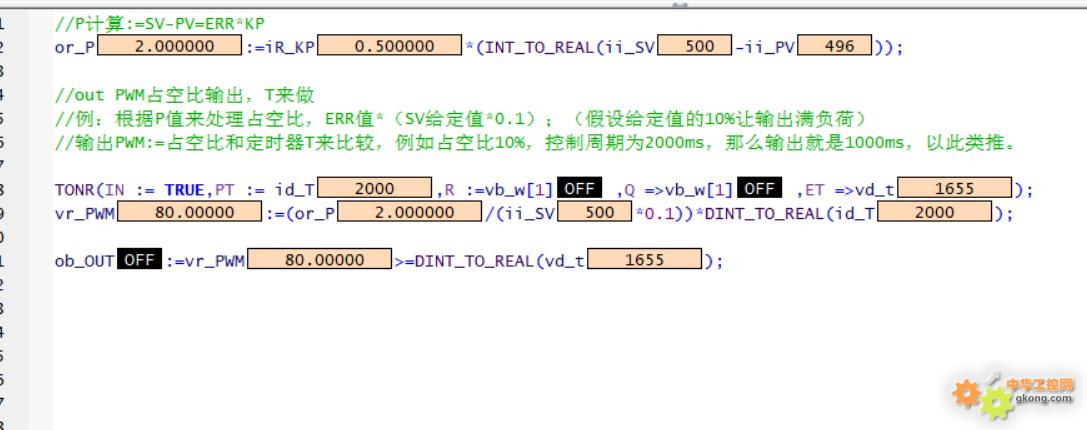
首先是P,比例控制,
视频是拿无人机来说的,例如,SV设置的10米,当前PV在6米,
那么ERR(误差):=(SV-PV)*KP,
是不是就是P了?
现有的PLC:汇川最新的easy,PS:自带PID块,看不懂,。调不来。手册也是看的一愣一愣的;


我测试了半天,感觉温度不是太准 (通讯读取温度,简易定时器+PID_OUT百分百=简易PWM输出Y点驱动继电器)。
程序就不上图了。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
因为不好用,自整定以后还是不行。、
我就在作妖,网上一堆PID教程,解释,我们能不能自己写个PID呢?
~~~~~~~~
B站教程:
https://www.bilibili.com/video/BV1GD4y1x7bV/?spm_id_from=333.337.search-card.all.click&vd_source=30022844041d7d5382f84a14a828d1c7
~~
首先是P,比例控制,
视频是拿无人机来说的,例如,SV设置的10米,当前PV在6米,
那么ERR(误差):=(SV-PV)*KP,
是不是就是P了?
[此贴子已经被jint于2023/11/28 9:35:55编辑过]