发表于:2010/12/2 11:33:37
#0楼
一般现在市售的步进电机的分度,这个问题一直困扰着大部分工控设计者。步进电机一般多为了2、4、8、16-------等细分数。这种细分数在分度的时候总是存在分度脉冲数和角度不匹配的现象。如400脉冲转动一圈,如此为1.1111111111-----个脉冲,这在累加到最后,总有无法重合的地方,总有一个小数被丢掉。这也就造成了分度不准确的情况。
我就这次的一个实例介绍一下本次设计的方法:
本机要求分割每分为42等份以下任意等份,用同步带轮拖动主轴。要求在转动4圈以后最终重合程度不大于0.1度,要求是非常的高了。为了减少累计误差,将步进细分数16细分,也就是6400脉冲一圈。但是这个6400脉冲和360度也是怎么也无法计算完整的。如此算下来,每度的脉冲数为17.777777777---------。这也是无法完成的一个数据。程序上来说基本是无法实现这一分度的了。
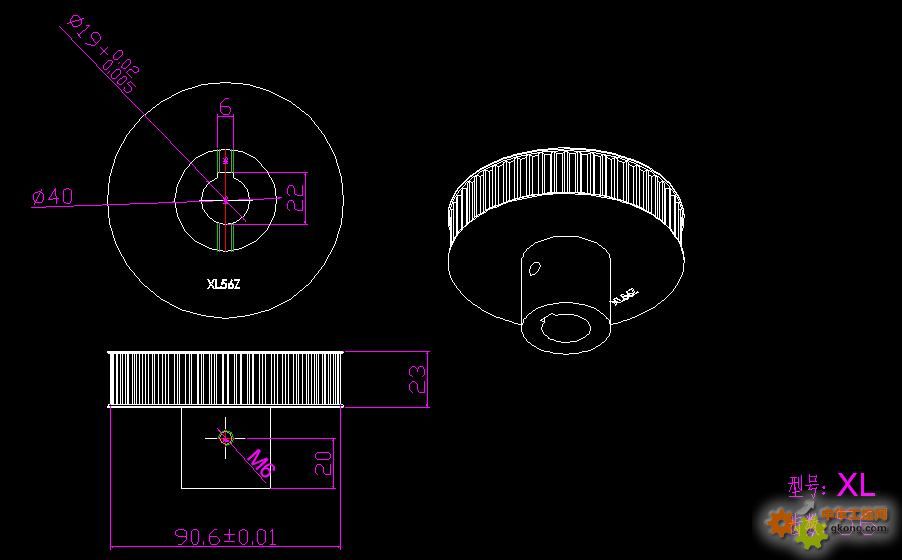
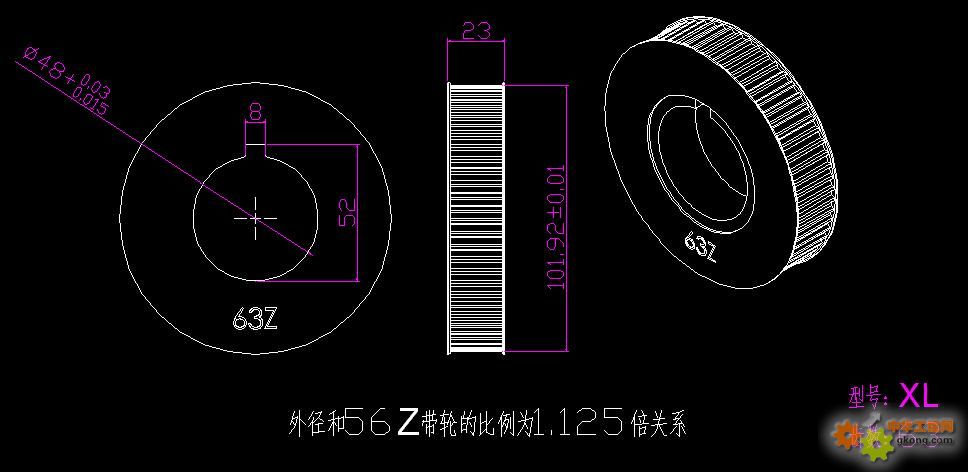
后来我想到,如果程序上无法实现,能不能在机械上做文章呢?如果把步进转动到某一个数值,而主轴刚好转动一圈或者一度,这样应该是可以的了。那个脉冲数和360度就应该是一个完整的倍率关系,和6400相近的就只7200,如此,如果给步进电机7200脉冲那么电机将多转动了800的位置。这种情况下,我将从动同步带轮也放大一个相应的比值,这时主轴就会因为转动比的关系而刚转动一圈。通过计算这个转动比的关系为7200:6400=1.125。设计时,我将主动轮和从动轮按1:1.125倍的关系来设计。按1:1.125的倍率关系来计算到同步轮的最佳齿数为56:63(感觉这是唯一的比值)。
通过装机的实践。以上设计方案,完全达到我的机器理想状态。
为此,基本上解决了,步进电机分度不准的问题。
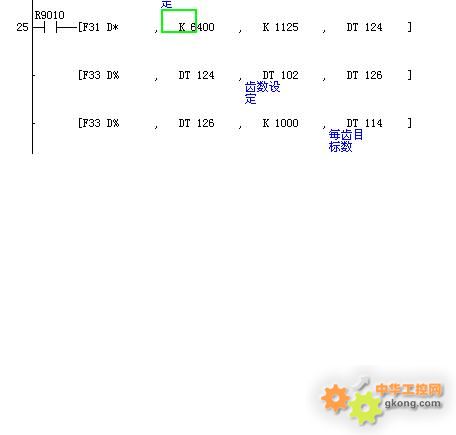
附图为程序编写方式:
![附件]()
我就这次的一个实例介绍一下本次设计的方法:
本机要求分割每分为42等份以下任意等份,用同步带轮拖动主轴。要求在转动4圈以后最终重合程度不大于0.1度,要求是非常的高了。为了减少累计误差,将步进细分数16细分,也就是6400脉冲一圈。但是这个6400脉冲和360度也是怎么也无法计算完整的。如此算下来,每度的脉冲数为17.777777777---------。这也是无法完成的一个数据。程序上来说基本是无法实现这一分度的了。
后来我想到,如果程序上无法实现,能不能在机械上做文章呢?如果把步进转动到某一个数值,而主轴刚好转动一圈或者一度,这样应该是可以的了。那个脉冲数和360度就应该是一个完整的倍率关系,和6400相近的就只7200,如此,如果给步进电机7200脉冲那么电机将多转动了800的位置。这种情况下,我将从动同步带轮也放大一个相应的比值,这时主轴就会因为转动比的关系而刚转动一圈。通过计算这个转动比的关系为7200:6400=1.125。设计时,我将主动轮和从动轮按1:1.125倍的关系来设计。按1:1.125的倍率关系来计算到同步轮的最佳齿数为56:63(感觉这是唯一的比值)。
通过装机的实践。以上设计方案,完全达到我的机器理想状态。
为此,基本上解决了,步进电机分度不准的问题。
附图为程序编写方式:
[此贴子已经被jint于2010/12/3 16:07:31编辑过]
汽车车桥生产在线检测设备;其它大批量零件生产过程检测,
承接:非标自动化设备设计、旧设备改良与维修; 单独非标项目合作。
承接:非标自动化设备设计、旧设备改良与维修; 单独非标项目合作。