发表于:2024/10/10 13:35:16
#0楼
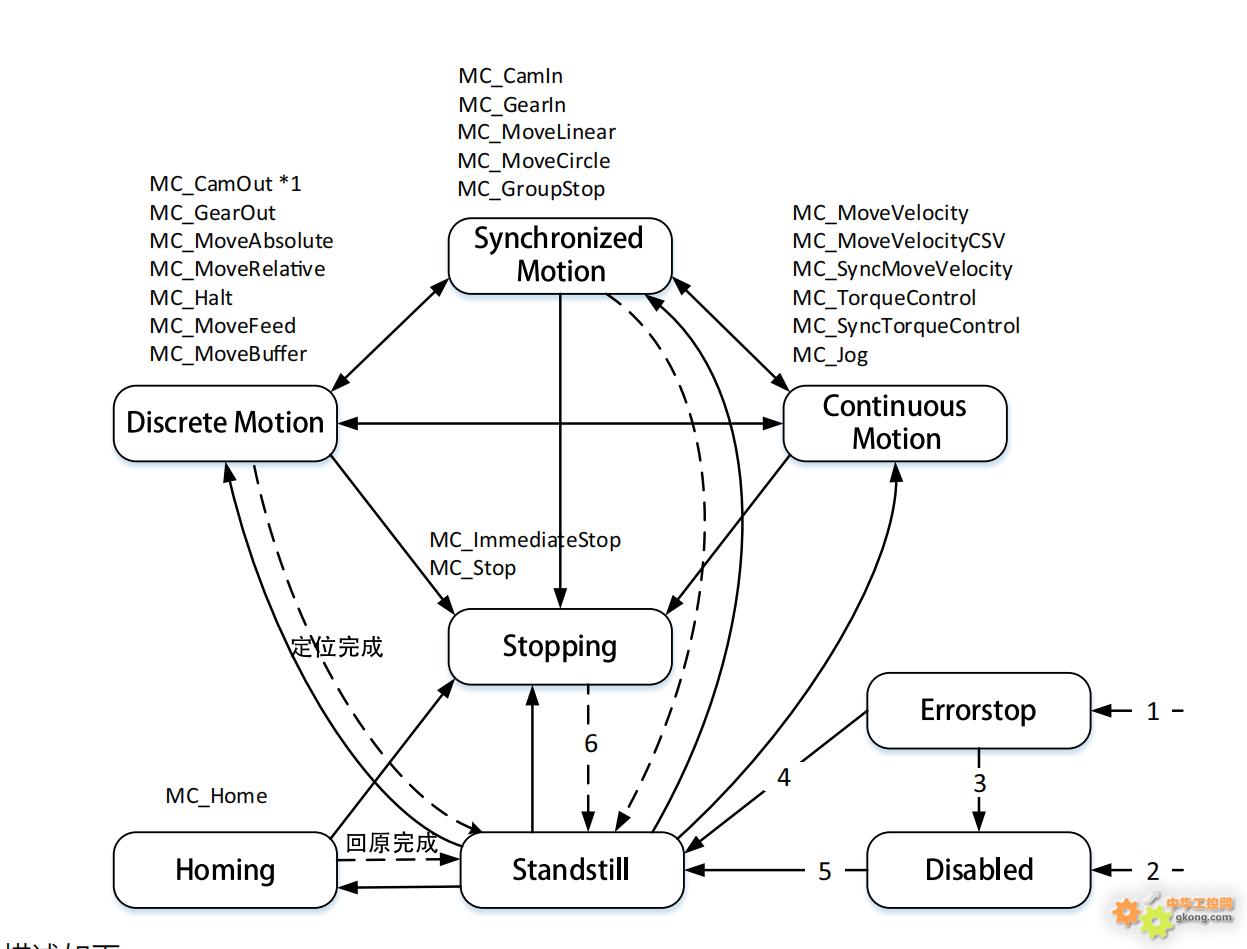
如题如何实现暂停功能呢?是暂停不是急停或停止。用的步进电机做定位控制,比如从A点到B点,在电机正在运行时此时按下暂停键就立马停止,松开就继续接着走到目的地。 俺试了好多种方法都不行,网上也没找到相应办法。在1200中步进定位控制中途是可以停止,比如绝对定位控制运行中如果按下停止是停止了,但不能继续接着走到目的地,必须要重新回原点再次触发绝对定位才能走到设定点位,感觉这不科学啊。
俺想既然运动控制PLC驱动步进或伺服运行是通过发脉冲,难道中途就不暂停么?比如从A点到B点需要10000个脉冲,当发了5000个脉冲走到中途一半时可以暂停,然后也能恢复继续发剩下的5000个脉冲使其走到目的点位。
俺想既然运动控制PLC驱动步进或伺服运行是通过发脉冲,难道中途就不暂停么?比如从A点到B点需要10000个脉冲,当发了5000个脉冲走到中途一半时可以暂停,然后也能恢复继续发剩下的5000个脉冲使其走到目的点位。
[此贴子已经被jint于2024/10/11 9:47:25编辑过]
10分悬赏