发表于:2025/3/5 10:05:50
#0楼
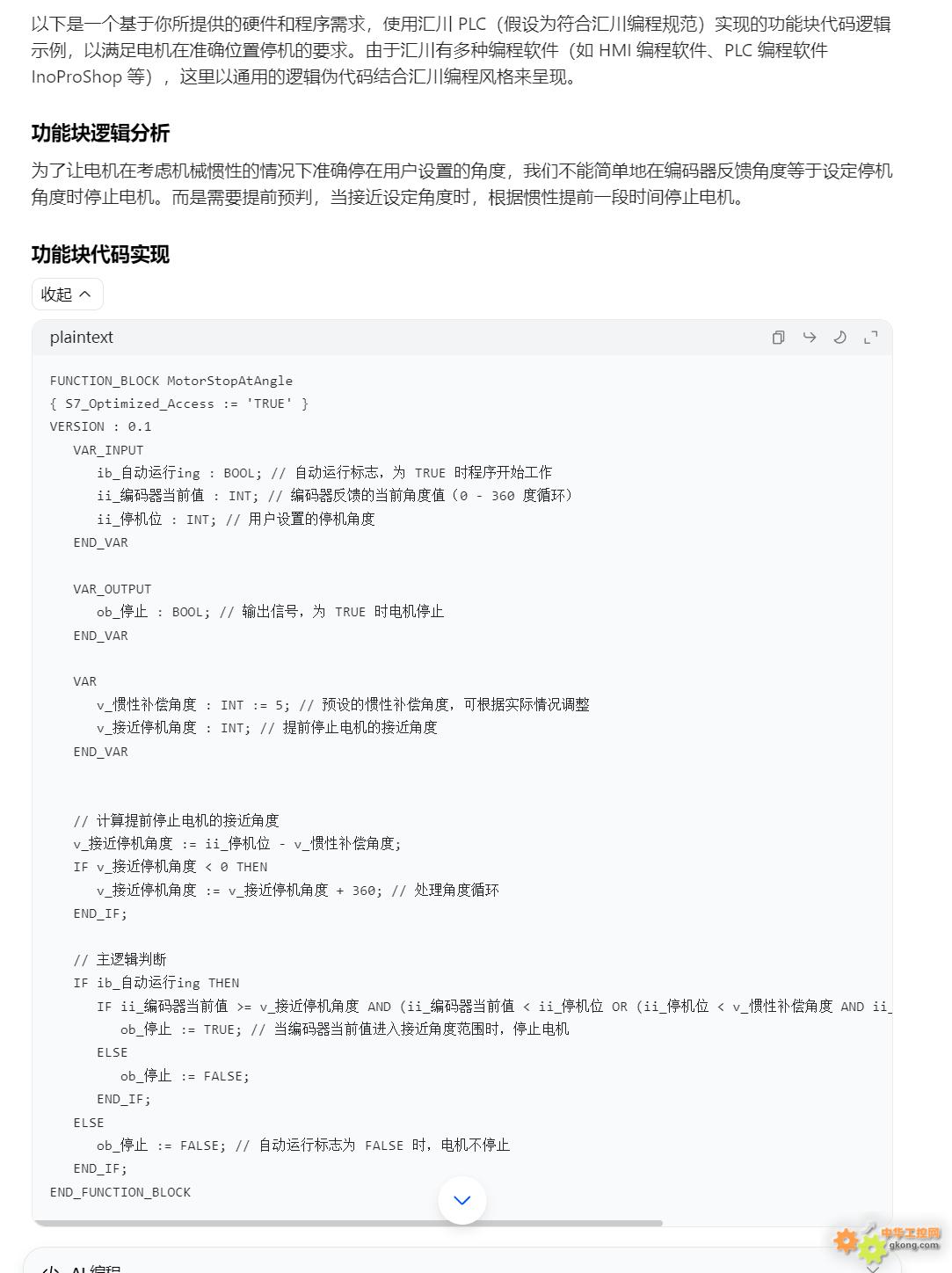
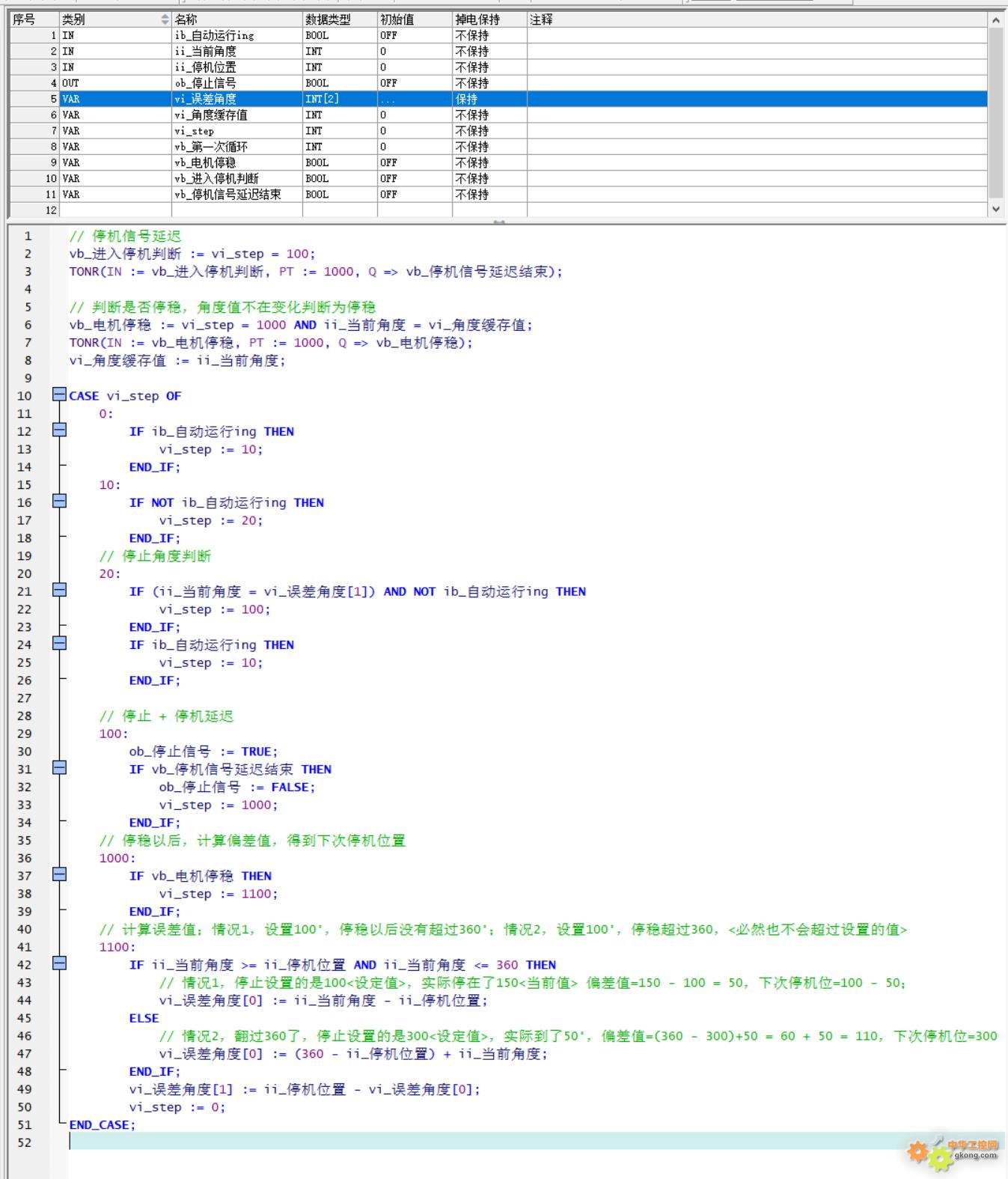
硬件:普通调速电机复杂动力输出(速度可调),分割器动作转盘,编码器反馈角度(0-360度循环计数,循环模式)
程序需求:用户设置停机角度,因为机械有惯性,所以需要程序控制电机达到准确的停机位置;
例如设置简单的程序逻辑,用户设置100°停机,做个简单的判断 当前角度==100度 则电机停止,停机,机械惯性肯定会跑到100+;
~~~~~~~~~~~~~~
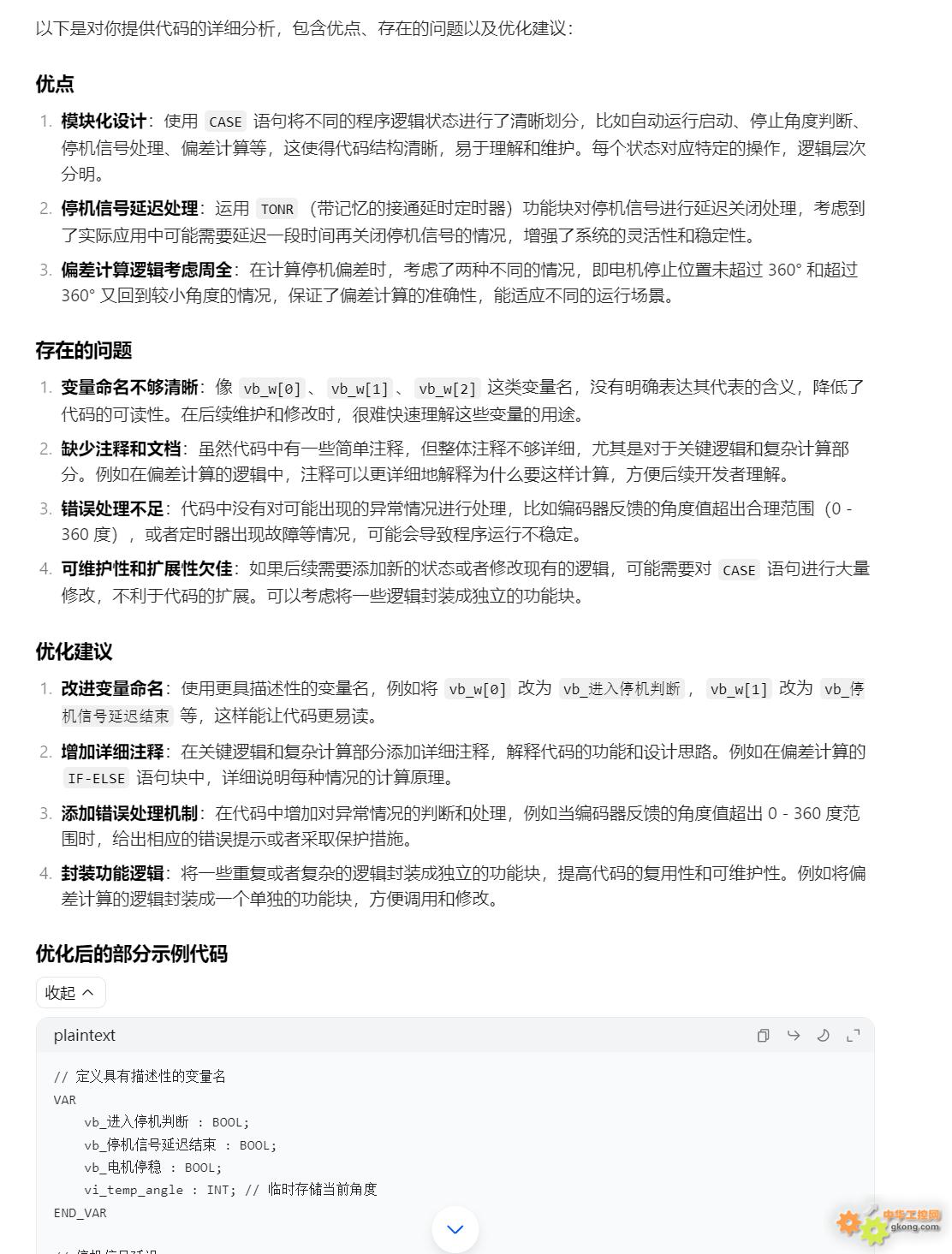
功能块变量命名规范: ab_cdef,a=i,o,io,v i是输入,o是输出,io是输入输出,v是局部变量,b是变量类型,b,B,i,D,r BOOL,字节,int,Dint,REAL,CDEF是变量名,用中文。
例如ib_自动运行ing 便是输入波尔类型,名字即是意义,自动运行中。
~~~~~~~~~~~~
功能块输入输出定义 ib_自动运行ing,ii_编码器当前值,ii_停机位,ob_停止
~~~~~~~~~
硬件是汇川的easy,
程序需求:用户设置停机角度,因为机械有惯性,所以需要程序控制电机达到准确的停机位置;
例如设置简单的程序逻辑,用户设置100°停机,做个简单的判断 当前角度==100度 则电机停止,停机,机械惯性肯定会跑到100+;
~~~~~~~~~~~~~~
功能块变量命名规范: ab_cdef,a=i,o,io,v i是输入,o是输出,io是输入输出,v是局部变量,b是变量类型,b,B,i,D,r BOOL,字节,int,Dint,REAL,CDEF是变量名,用中文。
例如ib_自动运行ing 便是输入波尔类型,名字即是意义,自动运行中。
~~~~~~~~~~~~
功能块输入输出定义 ib_自动运行ing,ii_编码器当前值,ii_停机位,ob_停止
~~~~~~~~~
硬件是汇川的easy,