发表于:2025/3/5 11:40:19
#10楼
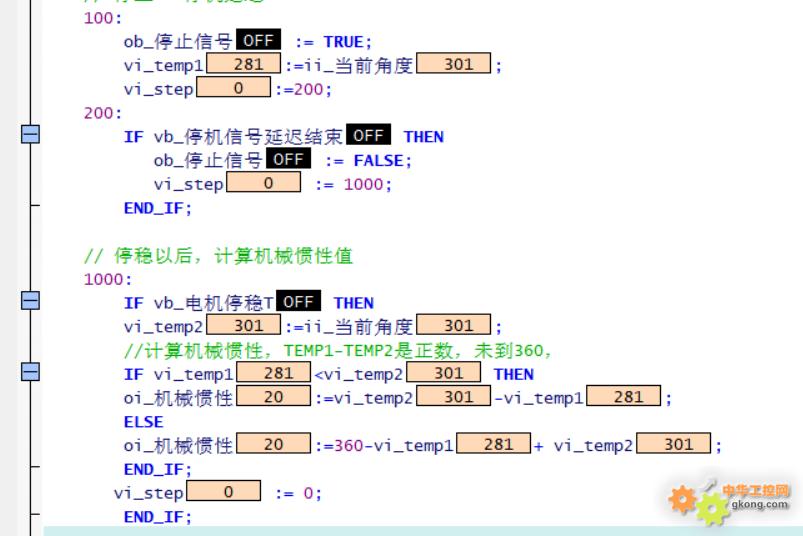
各位,实际测试了一下,
我写的逻辑有问题。
计算误差那个,每次计算是不科学的。
逻辑应该这样:
例:
停机位是50,实际停在了180,机械惯性130度,这个值如果没有调速的情况是不变的,<我的程序是每次计算>
程序应该逻辑判断偏差值师傅大于多少然后再计算实际停机角度值。
我在改改。
我写的逻辑有问题。
计算误差那个,每次计算是不科学的。
逻辑应该这样:
例:
停机位是50,实际停在了180,机械惯性130度,这个值如果没有调速的情况是不变的,<我的程序是每次计算>
程序应该逻辑判断偏差值师傅大于多少然后再计算实际停机角度值。
我在改改。