发表于:2024/5/20 8:46:44
#0楼
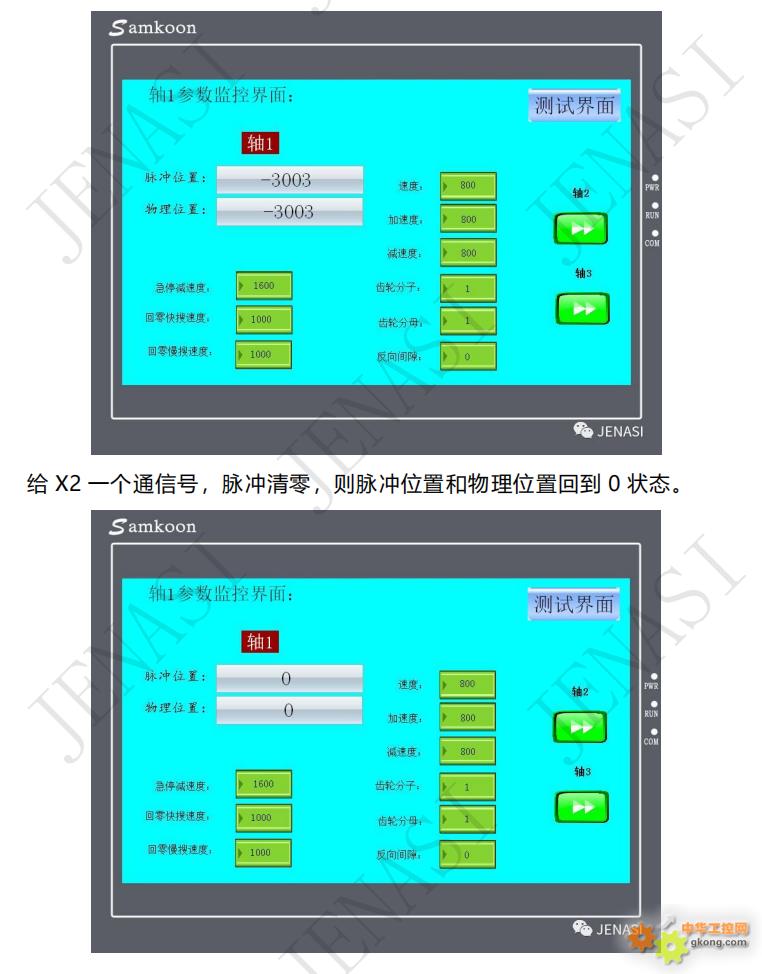
对步进电机进行正反转运动,轴的物理位置和脉冲位置均发生变化
时,现在要实现的就是将脉冲清零,就是脉冲位置和物理位置均回到初
始状态。因此必须设置的清零按钮。 【控制要求】
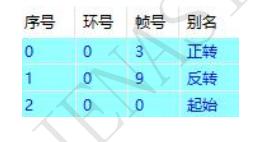
用感应器 X0 和 X1 分别控制电机正转和反转,若检测到 X0 有信号
时,步进电机正转,X0 断开信号时,电机紧急停止;若检测到 X1 有信
号时,步进电机反转,X1 断开信号时,电机紧急停止
【动作分析】
用两个感应器控制电机正反转,相当于是一个条件选择,满足 1 号条
件,1 好动作,满足 2 号条件,2 号动作。可以在同一个时序环中采用
条件跳转指令编辑程序。
当条件检测到感应器 X0 有信号时,动作跳转至步进电机正转动作程
序;当条件检测到感应器 X1 有信号时,动作跳转至步进电机反转动作程
序。
【控制流程图】
根据要求画出主程序动作的控制流程图。
![附件 微信图片_20240520084121.jpg]() 【修改别名】
【修改别名】
在软件别名处,对动作需要用到的端口进行别名修改:
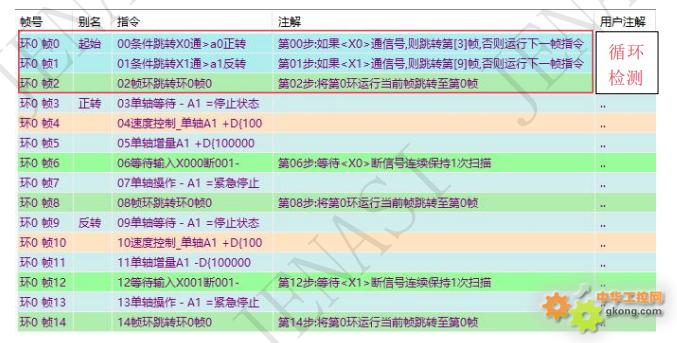
![附件 微信图片_20240325091552.jpg]() 根据编辑的程序,将正转开始程序第 3 帧,检测单轴停止状态别名
根据编辑的程序,将正转开始程序第 3 帧,检测单轴停止状态别名
为:正转;将反转开始程序第 8 帧,检测单轴停止状态别名为:反转。
![附件 微信图片_20240520084348.jpg]() 【程序编辑】
【程序编辑】
①时序环 0 编辑主程序:
添加控制正反转的条件跳转指令:添加条件跳转指令 X0(根据别名
跳转)通时跳转到正转程序指令帧;条件跳转 X1(根据别名跳转)通时
跳转到反转程序指令帧;为了保证程序正常运行不受干扰,可添加一个
帧环跳转,跳转到 0 环第 0 帧,也就是当输入没有信号时,程序始终从
第 0 帧开始检测。
然后添加控制步进电机正向动作的指令:添加单轴等待,先检测步进
电机为停止状态时,进行正向动作,速度比为 100,位移比值为 100000。
添加等待输入指令,X0 为断状态,再添加单轴操作指令,操作动作为紧
急停止。在帧 8 中添加帧环跳转指令,保证正转动作运行完之后又跳回
到首帧开始检测。
在帧 9-帧 13 中添加控制步进电机反向动作的指令:添加单轴等待,
检测步进电机为停止状态时,进行反向动作,速度比为 100,位移比值
为 100000。添加等待输入指令,X1 为断状态,再添加单轴操作指令,
操作动作为紧急停止。添加帧环跳转,运行完成之后回到 0 环第 0 帧。
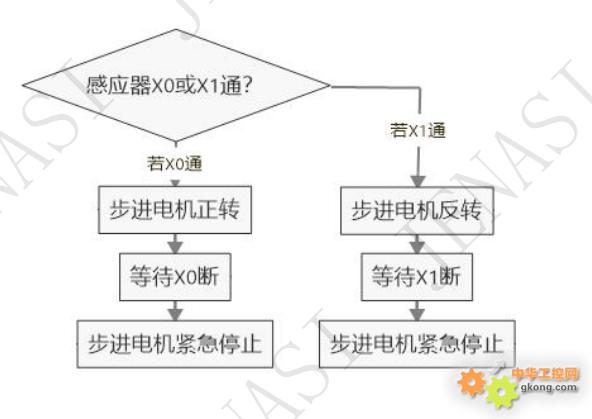
![附件 微信图片_20240520084450.jpg]() ②在组合帧中设置清零程序,设置开关 X2 为清零键,检测到 X2 有
②在组合帧中设置清零程序,设置开关 X2 为清零键,检测到 X2 有
通信号时,给轴脉冲清零,添加赋值运算,即轴脉冲位置,进行数值 0+0
运算。
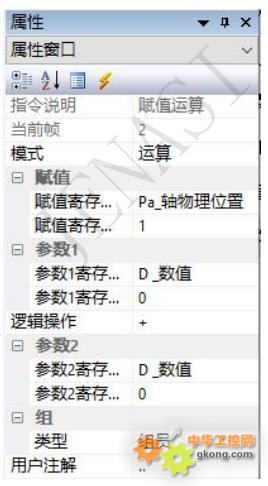
![附件 微信图片_20240520084545.jpg]() 赋值运算属性框设置:给轴脉冲赋值,选用的赋值寄存器类型为 P_ 轴脉冲位置(1 号轴,寄存器 ID 为 1;2 号轴,寄存器 ID 为 2......),
赋值运算属性框设置:给轴脉冲赋值,选用的赋值寄存器类型为 P_ 轴脉冲位置(1 号轴,寄存器 ID 为 1;2 号轴,寄存器 ID 为 2......),
选用的参数是数值 D,运算符为“+”。
![附件 微信图片_20240520084643.jpg]() 【触摸屏界面监控】
【触摸屏界面监控】
在触摸屏测试模板界面中,可以看到轴 1 的参数,初始状态,脉冲位
置和物理位置均为 0,给定输入信号,使轴发生正向和反向的动作,即
轴产生了距离。在辅助标志界面。此为步进电机反转。
![附件 微信图片_20240520084804.jpg]()
时,现在要实现的就是将脉冲清零,就是脉冲位置和物理位置均回到初
始状态。因此必须设置的清零按钮。 【控制要求】
用感应器 X0 和 X1 分别控制电机正转和反转,若检测到 X0 有信号
时,步进电机正转,X0 断开信号时,电机紧急停止;若检测到 X1 有信
号时,步进电机反转,X1 断开信号时,电机紧急停止
【动作分析】
用两个感应器控制电机正反转,相当于是一个条件选择,满足 1 号条
件,1 好动作,满足 2 号条件,2 号动作。可以在同一个时序环中采用
条件跳转指令编辑程序。
当条件检测到感应器 X0 有信号时,动作跳转至步进电机正转动作程
序;当条件检测到感应器 X1 有信号时,动作跳转至步进电机反转动作程
序。
【控制流程图】
根据要求画出主程序动作的控制流程图。
在软件别名处,对动作需要用到的端口进行别名修改:

为:正转;将反转开始程序第 8 帧,检测单轴停止状态别名为:反转。
①时序环 0 编辑主程序:
添加控制正反转的条件跳转指令:添加条件跳转指令 X0(根据别名
跳转)通时跳转到正转程序指令帧;条件跳转 X1(根据别名跳转)通时
跳转到反转程序指令帧;为了保证程序正常运行不受干扰,可添加一个
帧环跳转,跳转到 0 环第 0 帧,也就是当输入没有信号时,程序始终从
第 0 帧开始检测。
然后添加控制步进电机正向动作的指令:添加单轴等待,先检测步进
电机为停止状态时,进行正向动作,速度比为 100,位移比值为 100000。
添加等待输入指令,X0 为断状态,再添加单轴操作指令,操作动作为紧
急停止。在帧 8 中添加帧环跳转指令,保证正转动作运行完之后又跳回
到首帧开始检测。
在帧 9-帧 13 中添加控制步进电机反向动作的指令:添加单轴等待,
检测步进电机为停止状态时,进行反向动作,速度比为 100,位移比值
为 100000。添加等待输入指令,X1 为断状态,再添加单轴操作指令,
操作动作为紧急停止。添加帧环跳转,运行完成之后回到 0 环第 0 帧。
通信号时,给轴脉冲清零,添加赋值运算,即轴脉冲位置,进行数值 0+0
运算。

选用的参数是数值 D,运算符为“+”。
在触摸屏测试模板界面中,可以看到轴 1 的参数,初始状态,脉冲位
置和物理位置均为 0,给定输入信号,使轴发生正向和反向的动作,即
轴产生了距离。在辅助标志界面。此为步进电机反转。