














发表于:2022/9/26 10:00:47
#0楼
作者:施耐德电气李工
1.直接采用调试软件的控制
所需元素:1:调试软件SOMOVE
2: 蓝牙接口:VW3A8114 或USB-485调试电缆TCSMCNAM3M002P
3: LEXIUM32A 或LEXIUM32C 产品手册
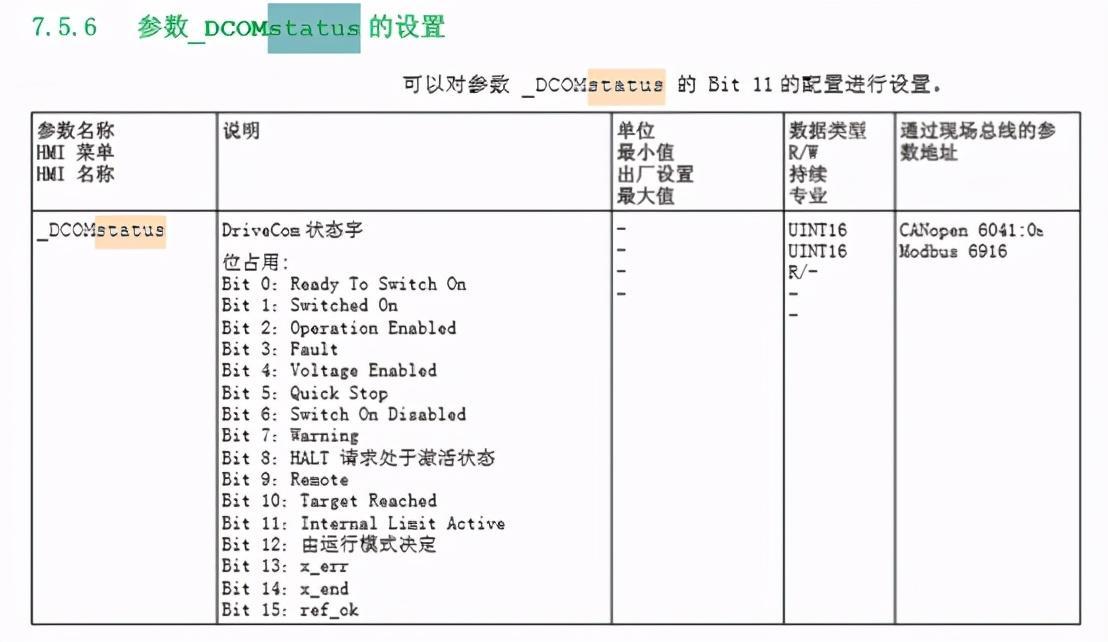
读状态6916
![附件 1.jpg]()
BIT 12: 1: 运行 0: 停止
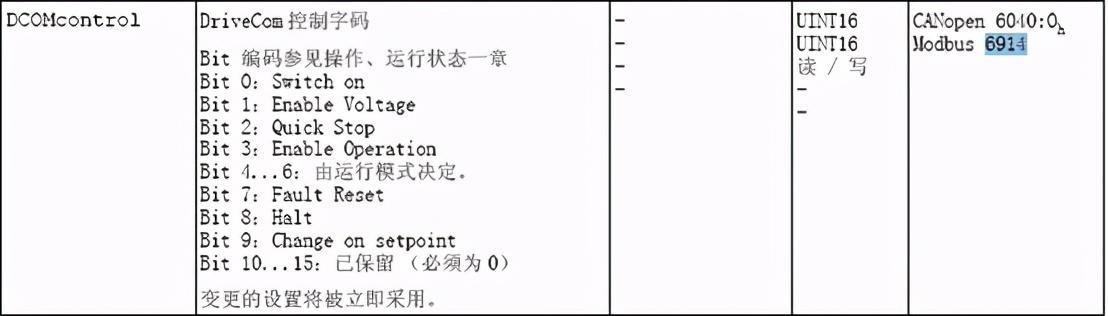
写命令字6914,
![附件 2.jpg]()
控制字: 6914 数据字 16#000F 使能,停止 15
6914 16#001F 启动绝对位置移动 31
6914 16#005F 启动相对位置移动 95
6914 16#000E 去使能
6914 16#008F 复位 143
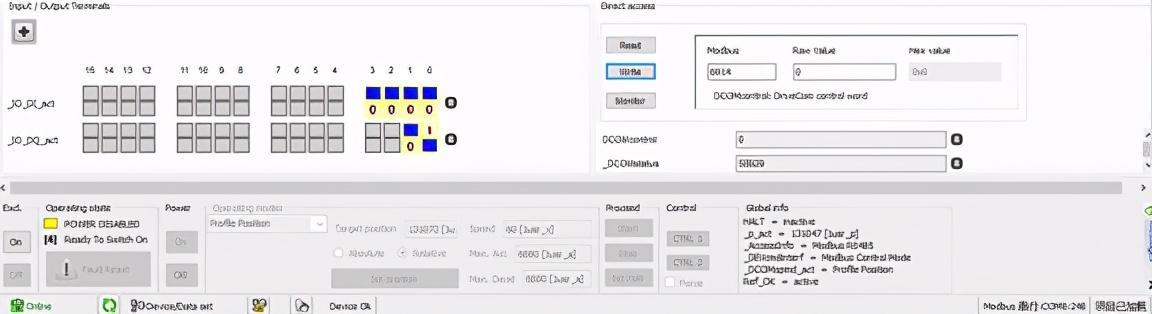
写入命令字:0,状态字:58929 16#E631
![附件 3.jpg]()
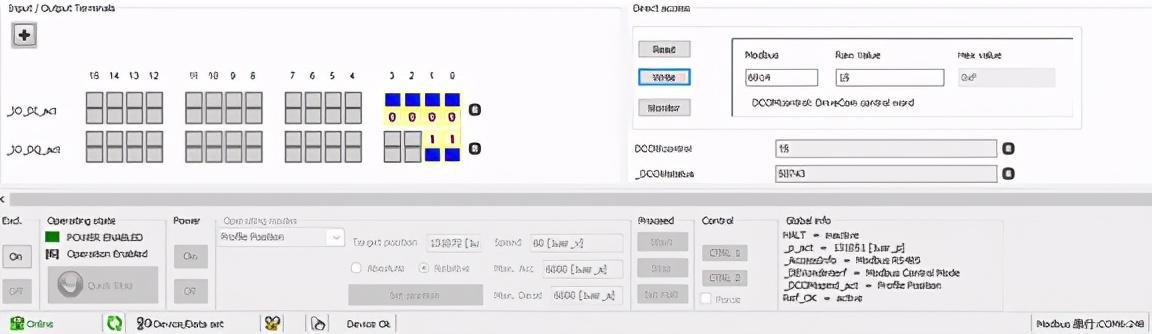
写入命令字:15,状态字:50743 16#C637 使能停止
![附件 4.jpg]()
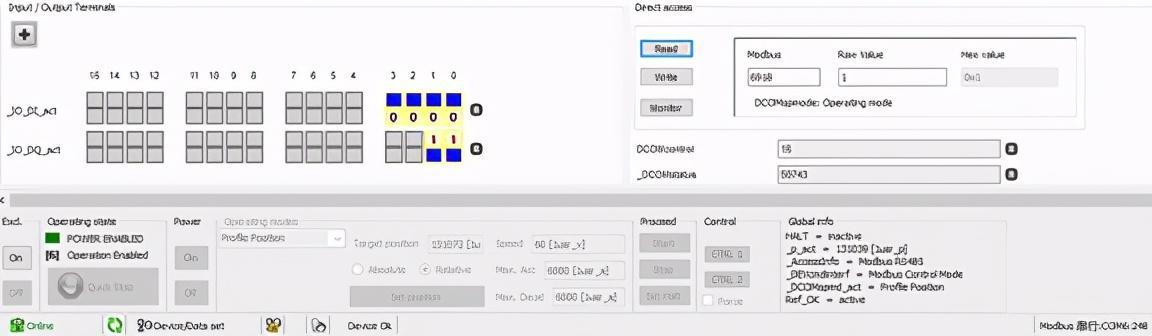
读模式:1,状态字:50743 16#C637 使能停止,走位置模式
![附件 5.jpg]()
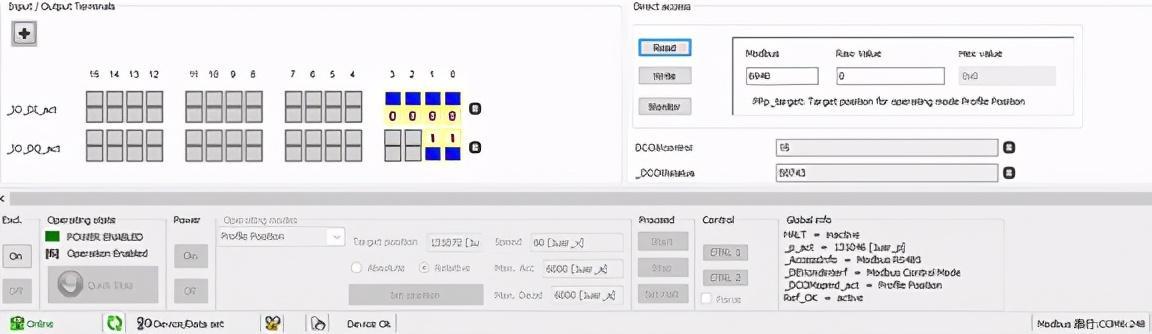
读位置模式目标位置:0,状态字:50743 16#C637 使能停止,走位置模式
![附件 6.jpg]()
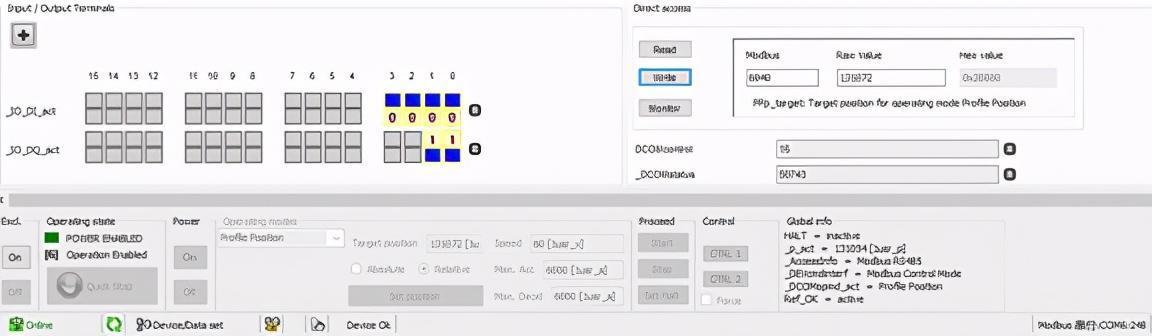
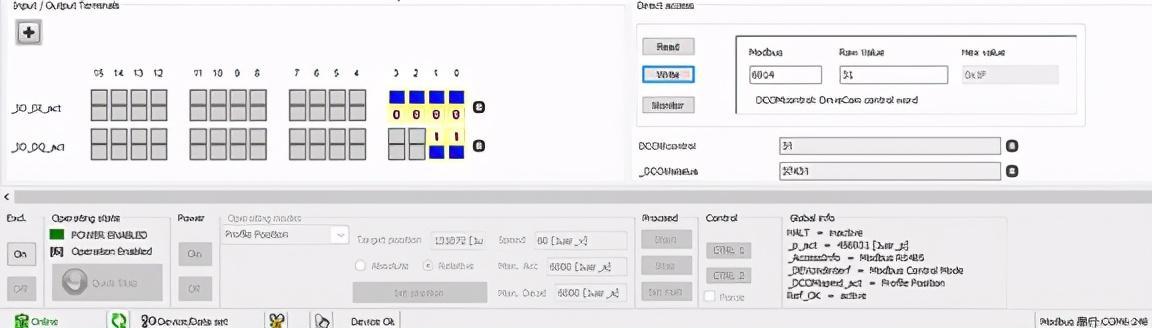
写位置模式目标位置:131072,状态字:50743 16#C637 使能停止,走位置模式
![附件 7.jpg]()
读位置模式目标速度:60,状态字:50743 16#C637 使能停止,走位置模式
![附件 8.jpg]()
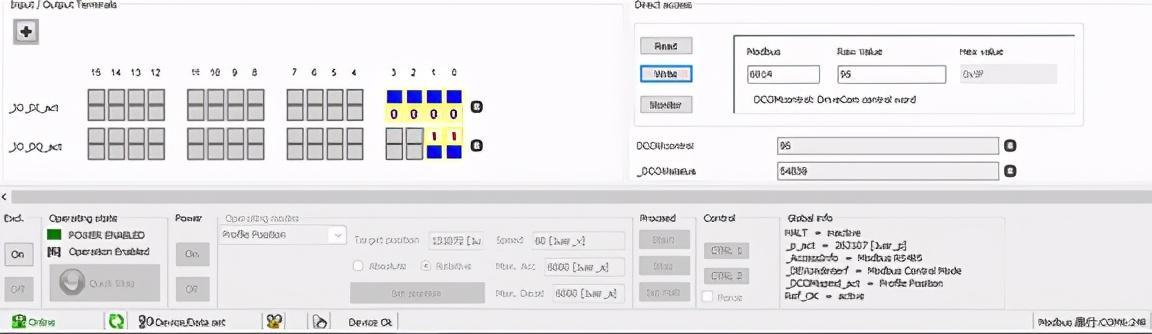
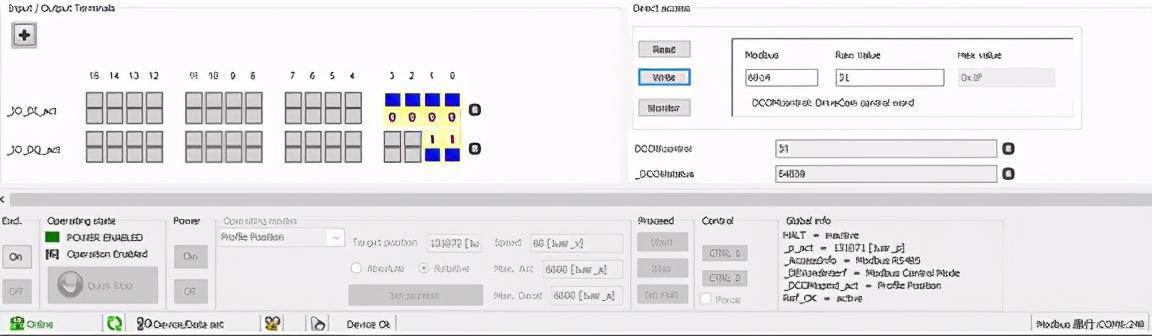
写启动相对位置移动命令字:95,状态字:37431 16#9237 使能电机运行中,走位置模式
![附件 9.jpg]()
状态字:54839 16#D637 使能电机运行到位,停止,走位置模式
![附件 10.jpg]()
写入命令字:15,状态字:50743 16#C637 使能,准备下一个运动
![附件 11.jpg]()
写启动绝对位置移动命令字:31,状态字:37431 16#9237 使能电机运行中,走位置模式
![附件 12.jpg]()
状态字:54839 16#D637 使能电机运行到位,停止。走位置模式
![附件 13.jpg]()
写入命令字:15,状态字:50743 16#C637 使能,准备下一个运动
点动模式
![附件 14.jpg]()
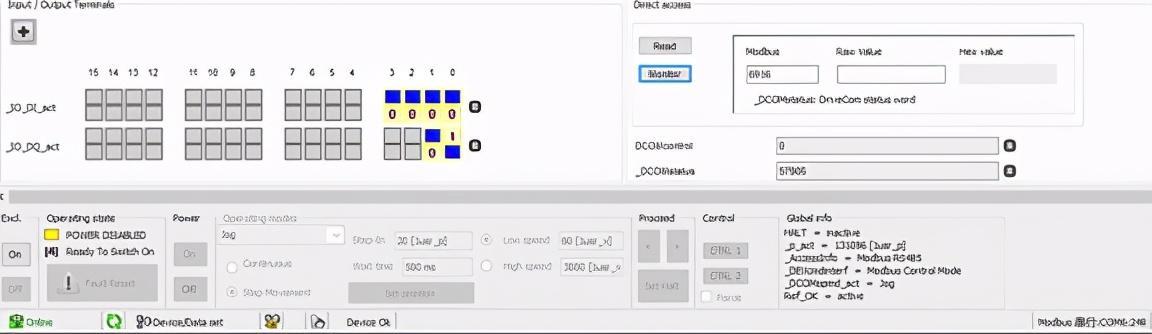
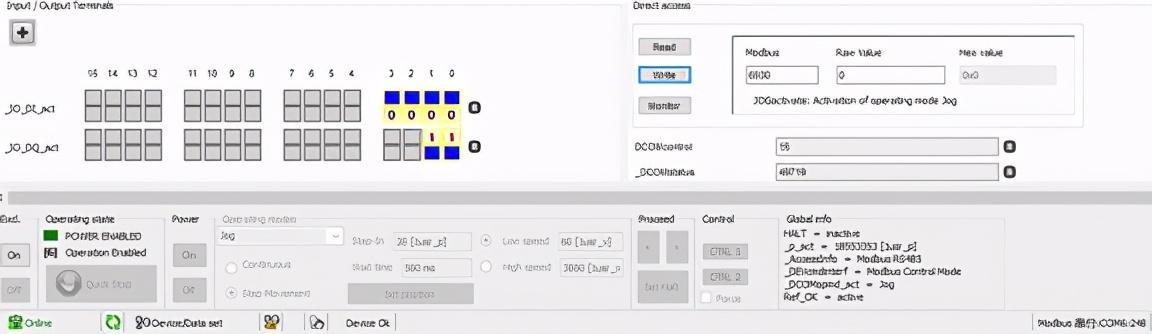
上电后,调入驱动器参数,看状态字:57905,16#E231,2#1110001000110001
![附件 15.jpg]()
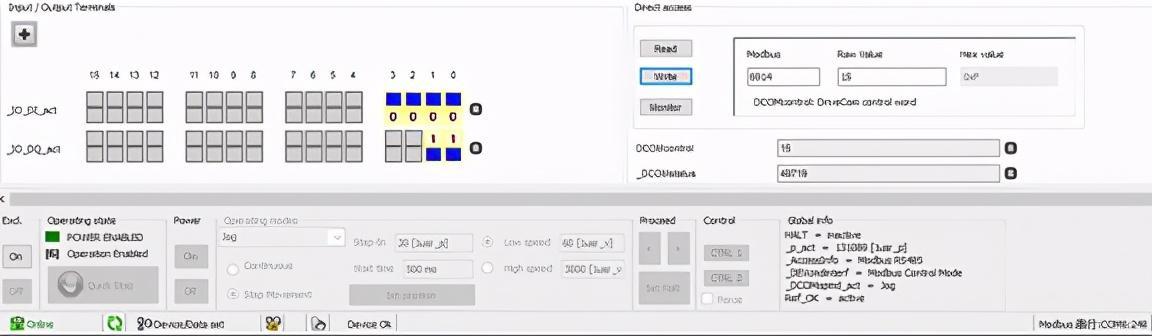
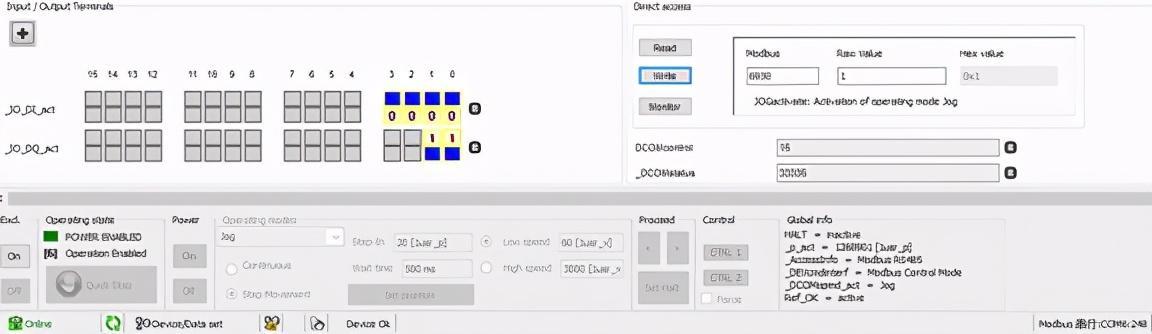
输入命令字15,状态字变为:49719,16#C237, 2#1100001000110111
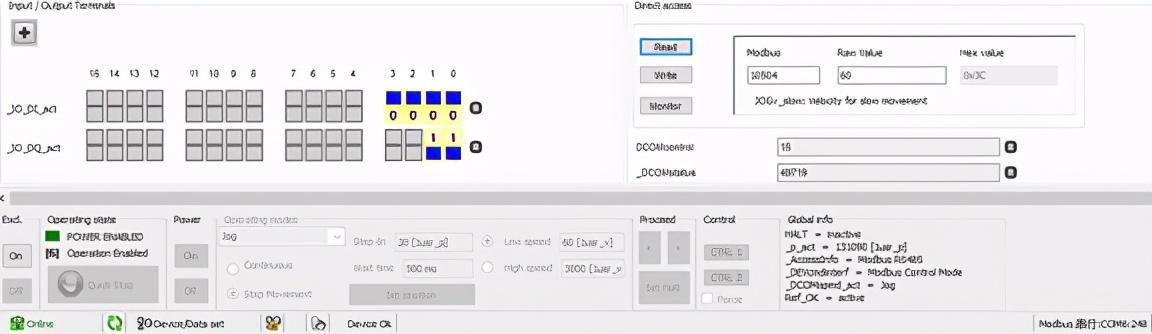
读JOG慢速10504,速度60
![附件 16.jpg]()
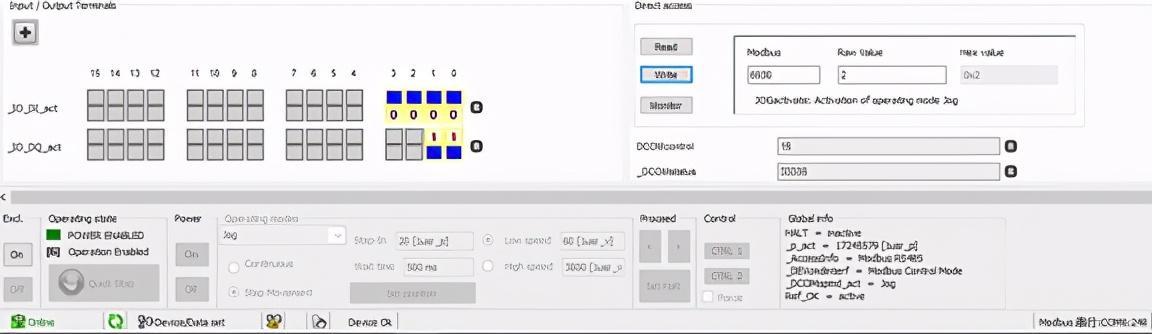
点动正向运动
![附件 17.jpg]()
状态字:33335 16#8237, 2#1000001000110111
停止
![附件 18.jpg]()
状态字:49719,16#C237, 2#1100001000110111
点动反向运动
![附件 19.jpg]()
状态字:33335 16#8237, 2#1000001000110111
速度模式
![附件 20.jpg]()
状态字:38455 ,16#9637 2# 1001011000110111
![附件 21.jpg]()
输入速度值100,电机转动。状态字:34359,16#8637,2# 1000011000110111
![附件 22.jpg]()
输入速度值 0,电机停止。状态字:38455 ,16#9637 2# 1001011000110111
![附件 23.jpg]()
输入-100,反转。状态字:34359,16#8637,2# 1000011000110111
![附件 24.jpg]()
急停。状态字:62999, 16#F617, 2# 1111011000010111
![附件 25.jpg]()
复位:状态字:54839 16#D637, 2# 1101011000110111
1.直接采用调试软件的控制
所需元素:1:调试软件SOMOVE
2: 蓝牙接口:VW3A8114 或USB-485调试电缆TCSMCNAM3M002P
3: LEXIUM32A 或LEXIUM32C 产品手册
读状态6916
BIT 12: 1: 运行 0: 停止
写命令字6914,
控制字: 6914 数据字 16#000F 使能,停止 15
6914 16#001F 启动绝对位置移动 31
6914 16#005F 启动相对位置移动 95
6914 16#000E 去使能
6914 16#008F 复位 143
写入命令字:0,状态字:58929 16#E631
写入命令字:15,状态字:50743 16#C637 使能停止
读模式:1,状态字:50743 16#C637 使能停止,走位置模式
读位置模式目标位置:0,状态字:50743 16#C637 使能停止,走位置模式
写位置模式目标位置:131072,状态字:50743 16#C637 使能停止,走位置模式
读位置模式目标速度:60,状态字:50743 16#C637 使能停止,走位置模式

写启动相对位置移动命令字:95,状态字:37431 16#9237 使能电机运行中,走位置模式

状态字:54839 16#D637 使能电机运行到位,停止,走位置模式
写入命令字:15,状态字:50743 16#C637 使能,准备下一个运动

写启动绝对位置移动命令字:31,状态字:37431 16#9237 使能电机运行中,走位置模式
状态字:54839 16#D637 使能电机运行到位,停止。走位置模式
写入命令字:15,状态字:50743 16#C637 使能,准备下一个运动
点动模式
上电后,调入驱动器参数,看状态字:57905,16#E231,2#1110001000110001
输入命令字15,状态字变为:49719,16#C237, 2#1100001000110111
读JOG慢速10504,速度60
点动正向运动
状态字:33335 16#8237, 2#1000001000110111
停止
状态字:49719,16#C237, 2#1100001000110111
点动反向运动
状态字:33335 16#8237, 2#1000001000110111
速度模式
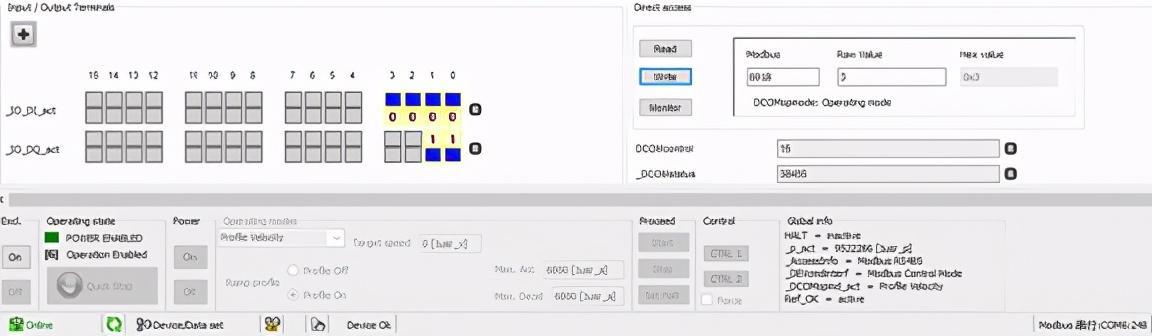
状态字:38455 ,16#9637 2# 1001011000110111
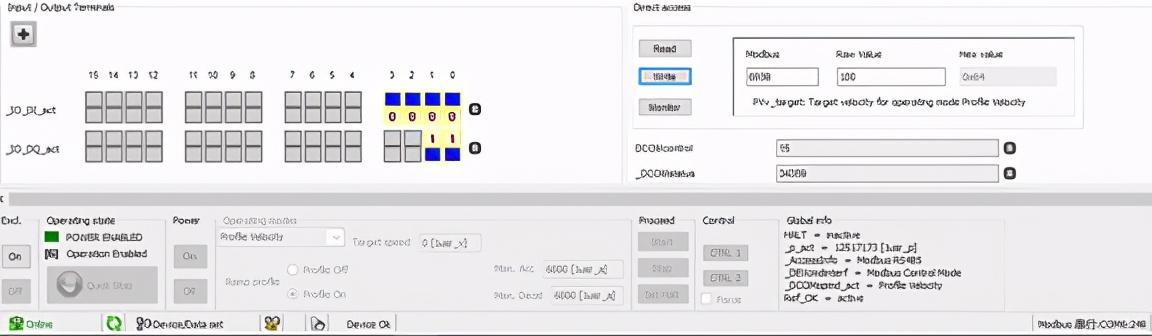
输入速度值100,电机转动。状态字:34359,16#8637,2# 1000011000110111

输入速度值 0,电机停止。状态字:38455 ,16#9637 2# 1001011000110111

输入-100,反转。状态字:34359,16#8637,2# 1000011000110111
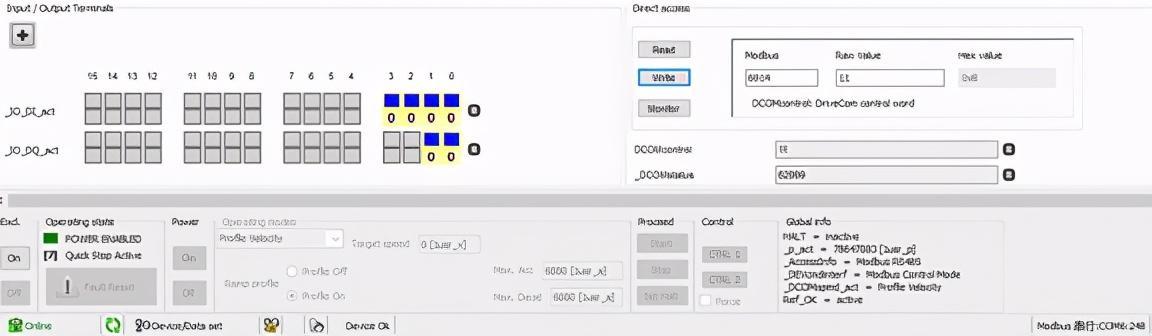
急停。状态字:62999, 16#F617, 2# 1111011000010111

复位:状态字:54839 16#D637, 2# 1101011000110111
[此贴子已经被作者于2022/9/26 10:03:05编辑过]
温馨提示:
电话:0755-26546361
邮箱:blog@gkong.com
微信公众号:工控论坛;微信号gkongbbs;
不定期修改账号密码;不要在多个网站用同一账号密码
可随时站内信联系,工作日可拨打电话或发邮件咨询相关问题
电话:0755-26546361
邮箱:blog@gkong.com
微信公众号:工控论坛;微信号gkongbbs;
不定期修改账号密码;不要在多个网站用同一账号密码
可随时站内信联系,工作日可拨打电话或发邮件咨询相关问题