














发表于:2022/7/18 13:53:42
#0楼
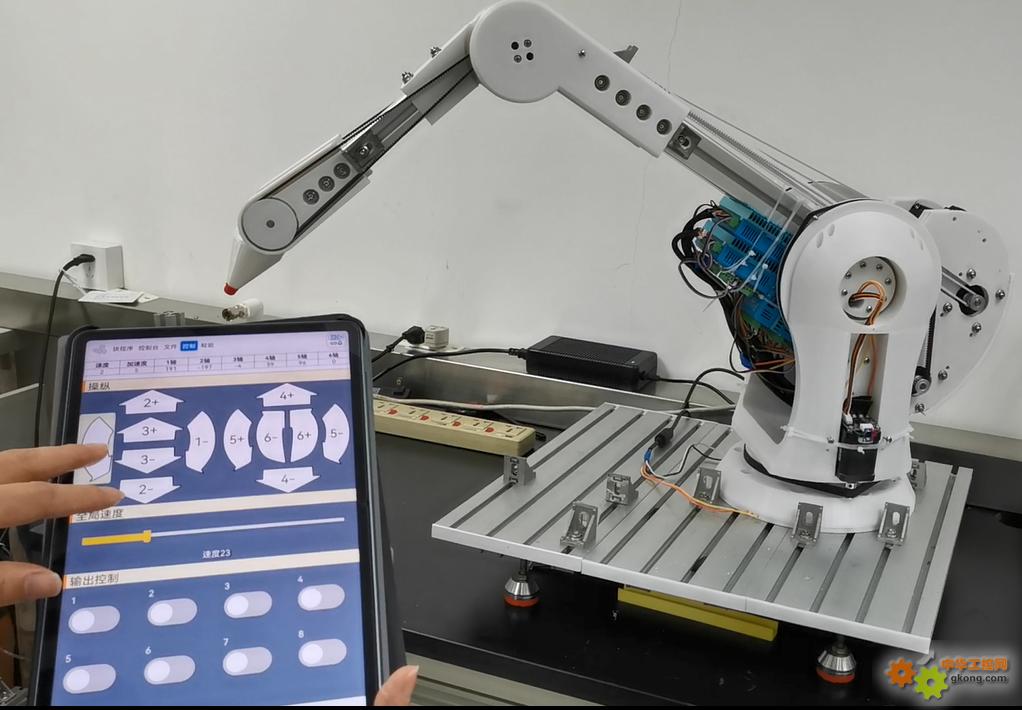
一、机械臂简介
机械制作方面采用铝型材、3D打印、同步带和步进电机,低成本的制作方案。控制器方面,使用esp32s3芯片,带有WiFi蓝牙功能。可以输出100KHZ脉冲,支持关节运动和直线运动指令,150mA 8路输出,6~36V 8路输入,带光耦隔离。编程方面,采用blockly可视化编程,使用手机或平板就可以完成编程。
哔哩哔哩视频:https://www.bilibili.com/video/BV13e4y1d73w
开源地址:https://oshwhub.com/qinzr/robot
或者:https://gitee.com/qzr123/tiny-6arm
![附件 Gu3IeXfqFb0T8CeSDq6H3gOeonRIvcf7zDUvAiwb.jpg]()
二、制作过程
1.机械部分
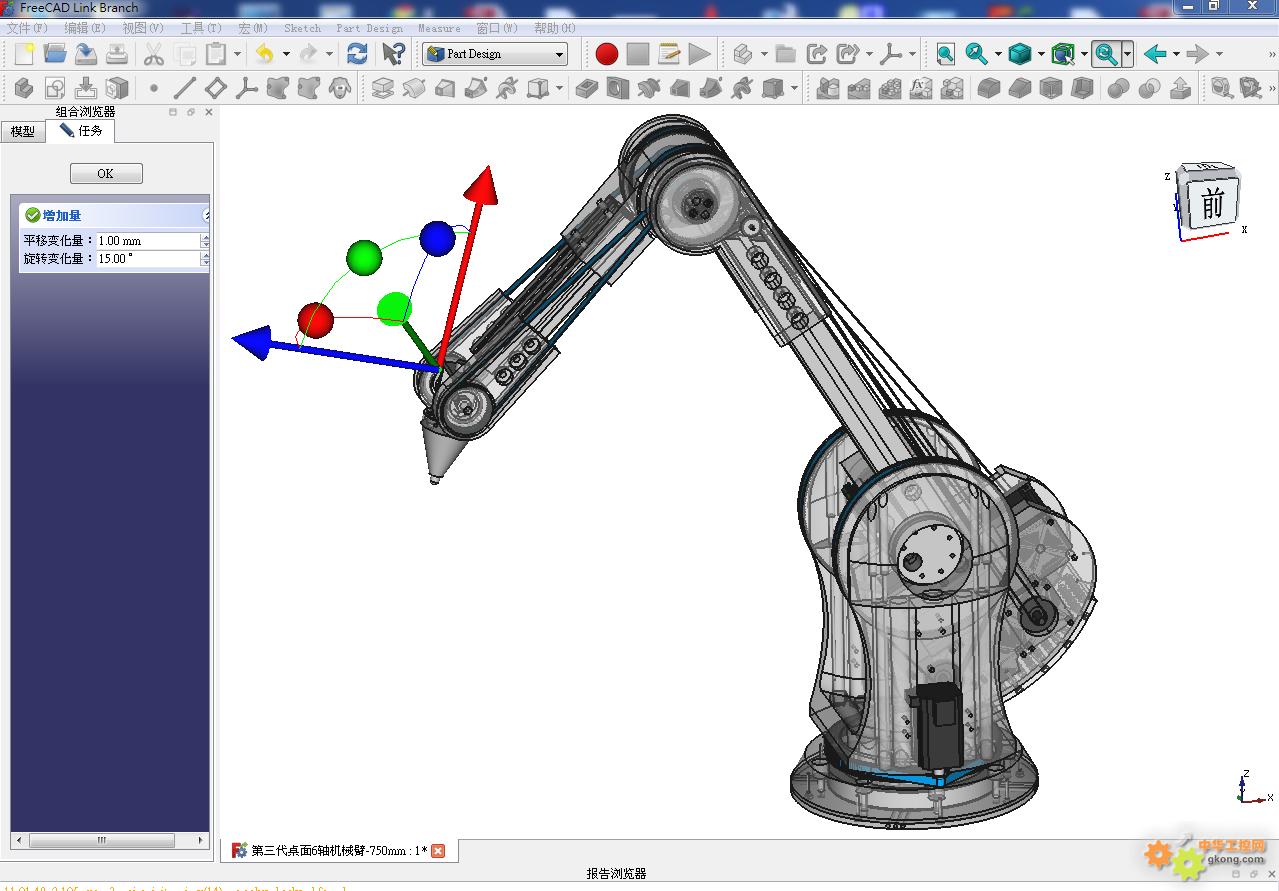
首先使用FreeCAD软件进行3D模型图绘制。FreeCAD是一个开源的3D设计软件,可以免费使用,方便二次开发,支持运动仿真和简单的有限元仿真。我使用它来设计我的机械臂。其中前三关节采用双电机结构,也就是说一个关节有两个电机,这样平衡的设计既提高了负载能力,也提高了精度和稳定性。现在这台机械臂拥有2.4kg负载能力和0.5mm的重複定位精度,以及765mm的臂长。
![附件 xsvp0I8bVpRcWoZwgXJb51RNd6uvhLNgYA97empe.jpg]()
2.控制器部分
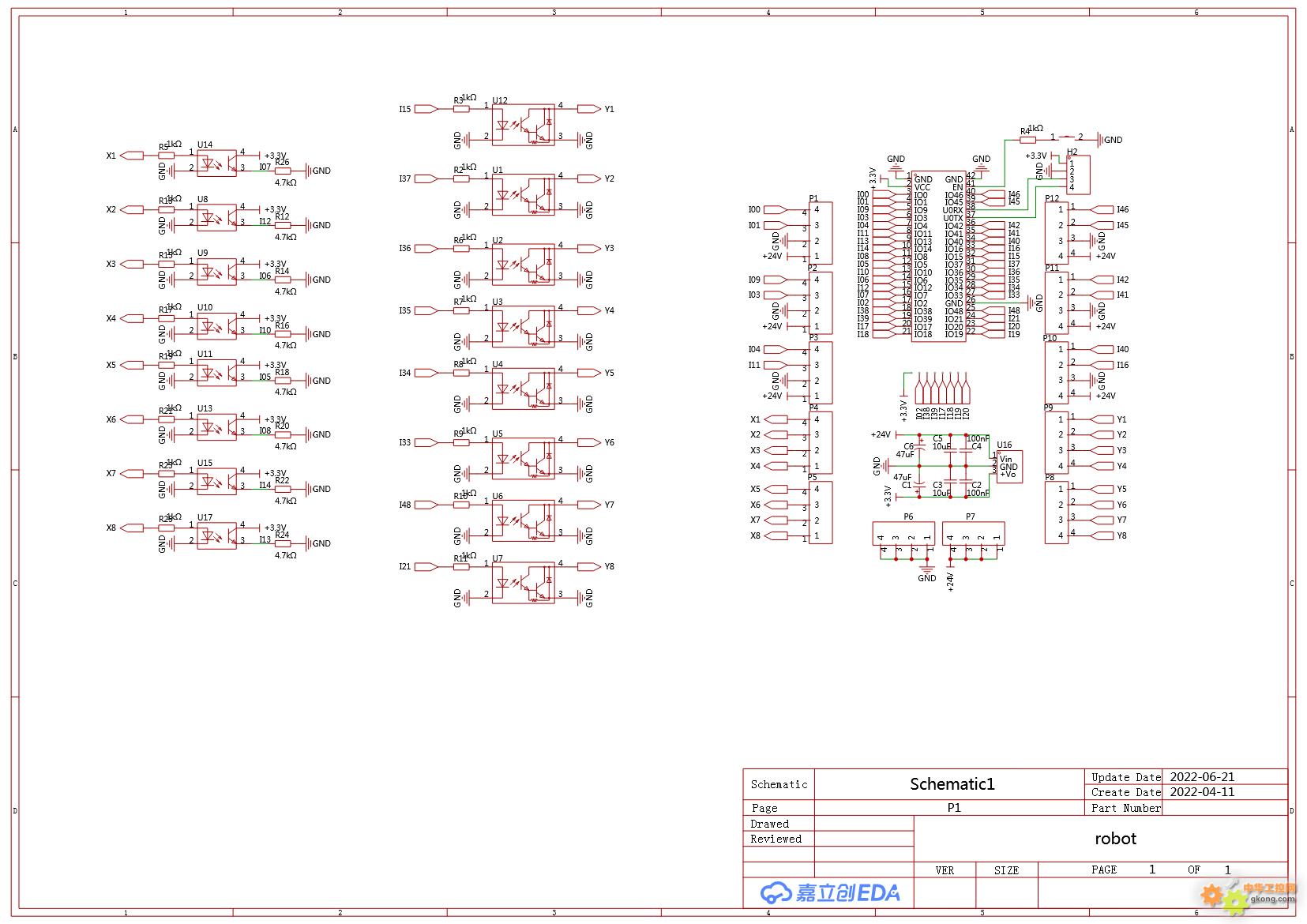
2.1 主控制器
主控制器采用ESP32-S3芯片,ESP32-S3芯片带有WiFi蓝牙功能,双核,240Mhz频率,45 个可编程 GPIO。性能可以满足机械臂运行算法,设计了6个脉冲控制接口,可以控制6轴机械臂。8路输入和8路输出,带光电耦合起到保护电路的作用,方便外接电磁阀。
![附件 nQb6qyy3V3kpcMsvGxJb8maz1C4y4m0JF0LWA5RJ.jpg]()
![附件 7xoe228490RpGgNabCRJQe98yweFfEllcwlOpepx.jpg]()
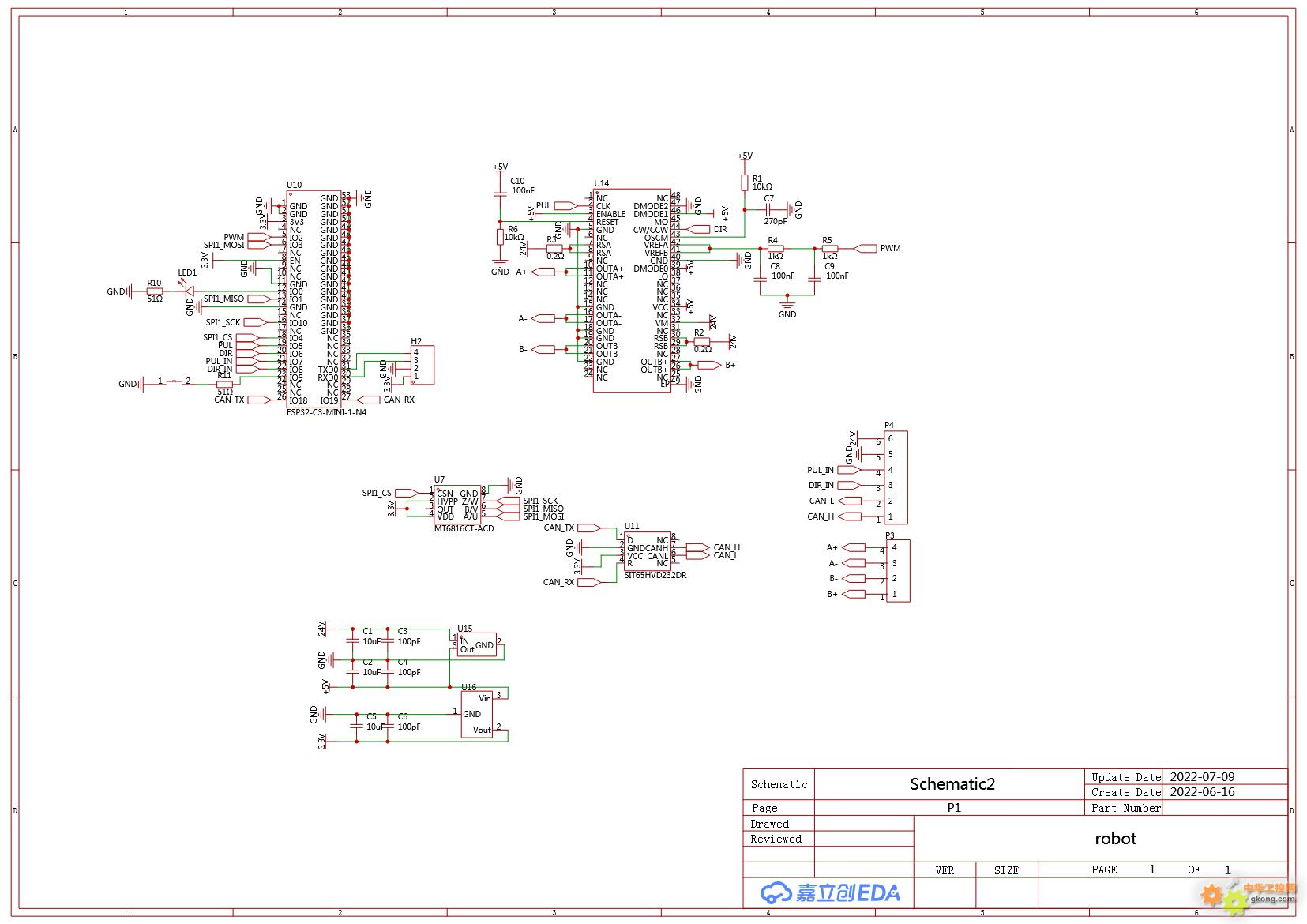
2.2 电机驱动部分
步进电机驱动采用TB67S109AFTG芯片,支持最大4A电流。控制芯片使用ESP32-C3,支持脉冲控制和CAN通信控制。磁编码器使用MT6816CT-ACD,14位单圈绝度编码器,最高精度可达0.02°。
![附件 ulIblKLklMTFSHSN7bJ1DCElo91p5jhNB0bbZLjs.jpg]()
![附件 OLoVvDcNmjBNOixFFkERuFowxMY22j5EJvIIg6R2.jpg]()
2.3 软件部分
主控板程序是基于开源micropython的,它实现了使用python语言就可完成单片机程序开发。驱动板编程是基于ESP-IDF库编写的C语言程序。手机控制软件是基于开源blockly和bipes编写的。
![附件 6298grD5jDriL36RuMsBAcOEAQ47aSIrE0N5pnnA.jpg]()
三、使用说明
请观看视频:https://www.bilibili.com/video/BV13e4y1d73w
机械制作方面采用铝型材、3D打印、同步带和步进电机,低成本的制作方案。控制器方面,使用esp32s3芯片,带有WiFi蓝牙功能。可以输出100KHZ脉冲,支持关节运动和直线运动指令,150mA 8路输出,6~36V 8路输入,带光耦隔离。编程方面,采用blockly可视化编程,使用手机或平板就可以完成编程。
哔哩哔哩视频:https://www.bilibili.com/video/BV13e4y1d73w
开源地址:https://oshwhub.com/qinzr/robot
或者:https://gitee.com/qzr123/tiny-6arm
二、制作过程
1.机械部分
首先使用FreeCAD软件进行3D模型图绘制。FreeCAD是一个开源的3D设计软件,可以免费使用,方便二次开发,支持运动仿真和简单的有限元仿真。我使用它来设计我的机械臂。其中前三关节采用双电机结构,也就是说一个关节有两个电机,这样平衡的设计既提高了负载能力,也提高了精度和稳定性。现在这台机械臂拥有2.4kg负载能力和0.5mm的重複定位精度,以及765mm的臂长。
2.控制器部分
2.1 主控制器
主控制器采用ESP32-S3芯片,ESP32-S3芯片带有WiFi蓝牙功能,双核,240Mhz频率,45 个可编程 GPIO。性能可以满足机械臂运行算法,设计了6个脉冲控制接口,可以控制6轴机械臂。8路输入和8路输出,带光电耦合起到保护电路的作用,方便外接电磁阀。

2.2 电机驱动部分
步进电机驱动采用TB67S109AFTG芯片,支持最大4A电流。控制芯片使用ESP32-C3,支持脉冲控制和CAN通信控制。磁编码器使用MT6816CT-ACD,14位单圈绝度编码器,最高精度可达0.02°。

2.3 软件部分
主控板程序是基于开源micropython的,它实现了使用python语言就可完成单片机程序开发。驱动板编程是基于ESP-IDF库编写的C语言程序。手机控制软件是基于开源blockly和bipes编写的。

三、使用说明
请观看视频:https://www.bilibili.com/video/BV13e4y1d73w
[此贴子已经被作者于2022/7/18 14:09:50编辑过]





