














发表于:2022/1/12 13:56:05
#0楼
zonedata数据类型:
zonedata数据类型是机器人转弯半径,即机器人在运行两句运动指令时,若设置了转弯半径,机器人会平滑的过渡,转弯半径意义为,机器人进入到设置点半径内的位置,机器人开始过渡。
Fine:
使用fine,可以准确的到达某一个对应的点位。
z0和fine的区别:
轨迹上,z0和fine类似,但也有却别,如图3、图4。z0可以提前预读程序,到达对应点就平滑移动过去:fine除了准确到达,还有一个阻止程序预读的功能
![附件 微信图片_20220112135047.jpg]()
![附件 微信图片_20220112135053.jpg]()
机器人运行的时候,示教器有2个图标,一个是左侧的箭头,表示程序已经读取到哪一行,还有一个是机器人图标,表示机器人实际在走哪一行。为了要实现平滑过渡等功能,机器人要预读几行代码。
如果使用了图1的z0,机器人在走第35行,程序已经执行到36行,即机器人还没走到位置已经打开do
如果使用了图2 的fine,机器人在走第33行,程序还在33行,即有了fine,程序指针不会预读,即机器人走完33行后,才会执行打开do
![附件 微信图片_20220112135058.jpg]()
![附件 微信图片_20220112135102.jpg]()
zonedata数据类型是机器人转弯半径,即机器人在运行两句运动指令时,若设置了转弯半径,机器人会平滑的过渡,转弯半径意义为,机器人进入到设置点半径内的位置,机器人开始过渡。
Fine:
使用fine,可以准确的到达某一个对应的点位。
z0和fine的区别:
轨迹上,z0和fine类似,但也有却别,如图3、图4。z0可以提前预读程序,到达对应点就平滑移动过去:fine除了准确到达,还有一个阻止程序预读的功能
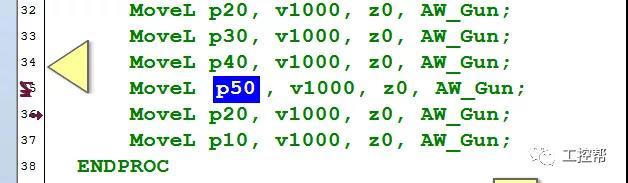
图1 使用z0
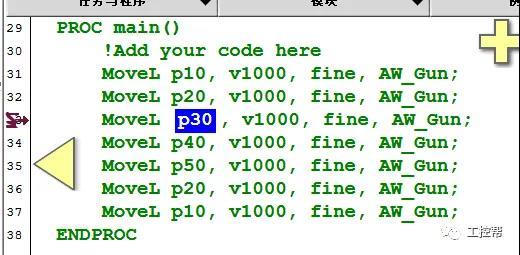
图2 使用fine
机器人运行的时候,示教器有2个图标,一个是左侧的箭头,表示程序已经读取到哪一行,还有一个是机器人图标,表示机器人实际在走哪一行。为了要实现平滑过渡等功能,机器人要预读几行代码。
如果使用了图1的z0,机器人在走第35行,程序已经执行到36行,即机器人还没走到位置已经打开do
如果使用了图2 的fine,机器人在走第33行,程序还在33行,即有了fine,程序指针不会预读,即机器人走完33行后,才会执行打开do
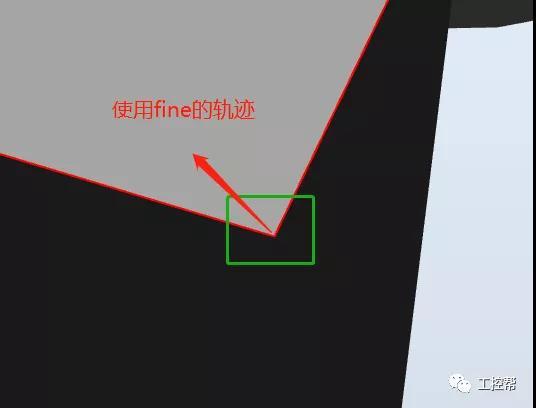
图3 使用fine时某一点的轨迹

图4 使用z0时,某一点的轨迹
人生最大的投资在于学习,而培训是学习快人一步的方式。