














发表于:2022/1/5 14:29:14
#0楼
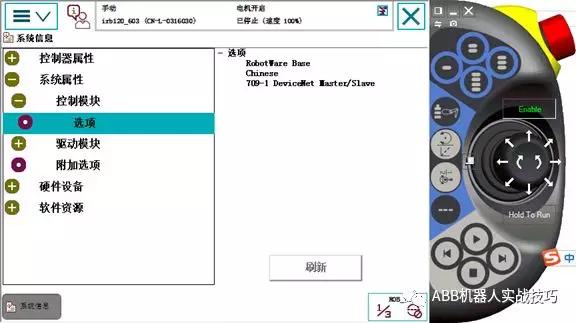
1)此处举例机器人做devicenet从站
2)机器人要有devicenet总线选项
![附件 640.jpg]()
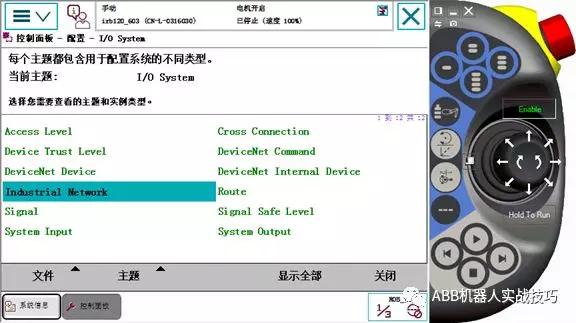
3)修改机器人devicenet从站地址
4)点击IndustryNetwork-devicenet
![附件 640 (1).jpg]()
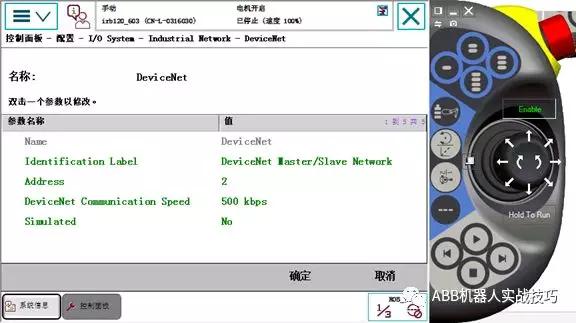
修改地址
![附件 640 (2).jpg]()
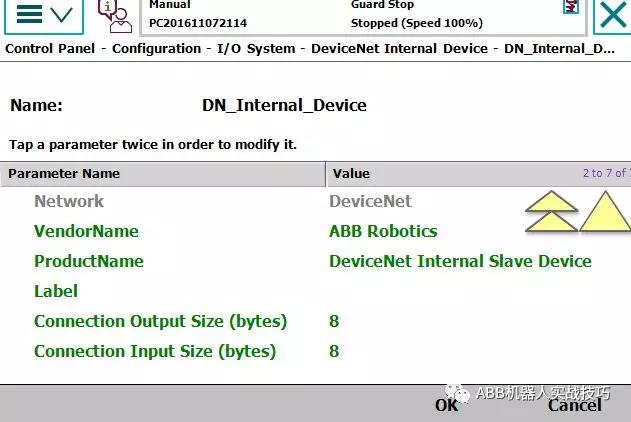
5)点击Devicenet Internal Device,修改输入输出字节数
![附件 640 (3).jpg]()
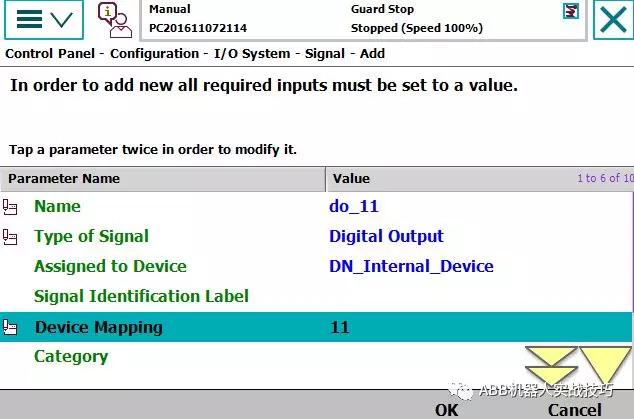
6)新建signal,Assigned to Device选DN_Internal_Device,设置mapping
![附件 640 (4).jpg]()
如何获得机器人做devicenet从站的EDS描述文件
1)打开robotstudio
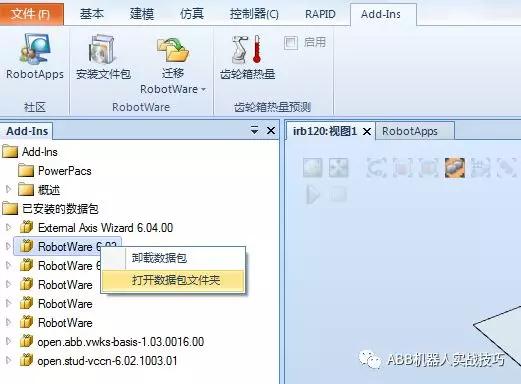
2)在add-in里,右击对应robotware,打开数据包文件夹
![附件 640 (5).jpg]()
3)如下路径
…\ABB.RobotWare-.03.0140\RobotPackages\RobotWare_RPK_6.03.0140\utility\service\EDS
4)IRC5_Slave_DSQC1006.eds即机器人做从站的描述文件
2)机器人要有devicenet总线选项
3)修改机器人devicenet从站地址
4)点击IndustryNetwork-devicenet
修改地址
5)点击Devicenet Internal Device,修改输入输出字节数
6)新建signal,Assigned to Device选DN_Internal_Device,设置mapping
如何获得机器人做devicenet从站的EDS描述文件
1)打开robotstudio
2)在add-in里,右击对应robotware,打开数据包文件夹
3)如下路径
…\ABB.RobotWare-.03.0140\RobotPackages\RobotWare_RPK_6.03.0140\utility\service\EDS
4)IRC5_Slave_DSQC1006.eds即机器人做从站的描述文件
人生最大的投资在于学习,而培训是学习快人一步的方式。
