













发表于:2021/11/17 11:56:16
#0楼
一、 工作流程简介:
1、 踏板/集鸽器模式 操作预想流程:
(1):将模板上人工放置足环,人工调节设备高度。
(2):设备上电,修改基本配置参数.
(3):按下设备复位按钮,设备复位(回到原点)。
(4):按下设备开始按钮,设备开始运行。
(5):设备运行到设定周期次数后,停止运行,在PC显示测试结果,并生成测试报告(运行过程中需要实时存储),并配有红绿指示灯(绿色代表测试成功,红色代表测试失败。
(6):若临时需要停止运行设备,但设备未到达预定运行次数时,测试人员可通过按下设备停止按钮,设备停止运行,PC显示截至到当前停止时刻的测试结果,生成测试报告及过程数据(运行过程中需要实时存储),并配有红绿指示(绿色代表测试成功,红色代表测试失败)。
2、 足环模式 操作预想流程:
(1):将模板上人工预放置第一批足环,人工调节设备高度。
(2):设备上电,修改基本配置参数。
(3):按下设备复位按钮,设备复位(回到原点)。
(4):按下设备开始按钮,设备开始运行。
(5):设备运行到设定周期次数后,停止运行,在PC显示测试结果(大面积红绿色pass fail),配有红绿指示灯(绿色代表测试成功,红色代表测试失败),成功失败结果需与我方开发人员沟通。
(6):人工更换测试足环。
(7):重复4~6动作。
(8):人工按下测试完成按钮,在PC生成测试报告(运行过程中需要实时存储)。
二、 PC页面配置功能需求:
(1):端口配置、波特率、奇偶校验、停止位、开关串口。
(2):模式选择:踏板(集鸽器)测试模式(具体测试项目如下所示,可配置是否测试)、足环测试模式(具体测试项目如下所示)。
(3):当前测试报告名称 (人工手动输入)加PC实时时间。
(4):足环角度数据(人工手动更换不同的模板)。
(5):实际调节的设备测试高度参数,足环距离被测试踏板的高位为0~30cm,高度可调,设备上要有调节刻度尺(人工手动调节设备的数据)。
(6):设定运行速度,最高为2.0M/S(人工输入参数,设备自动调节)。
(7):运行周期次数(人工输入参数,设备自动调节)。
(8):单运行周期内静止等待时间(正方向)(人工输入参数,设备自动调节)。
(9):单运行周期内静止等待时间(反方向)(人工输入参数,设备自动调节)。
(10):当前托盘模板中放置的足环总数,最多数量为12个(人工手动输入)。
(11):在踏板(集鸽器)测试模式下,需额外配置最多12个足环信息(单个足环信息占用16字节),同时可配置是否工作。
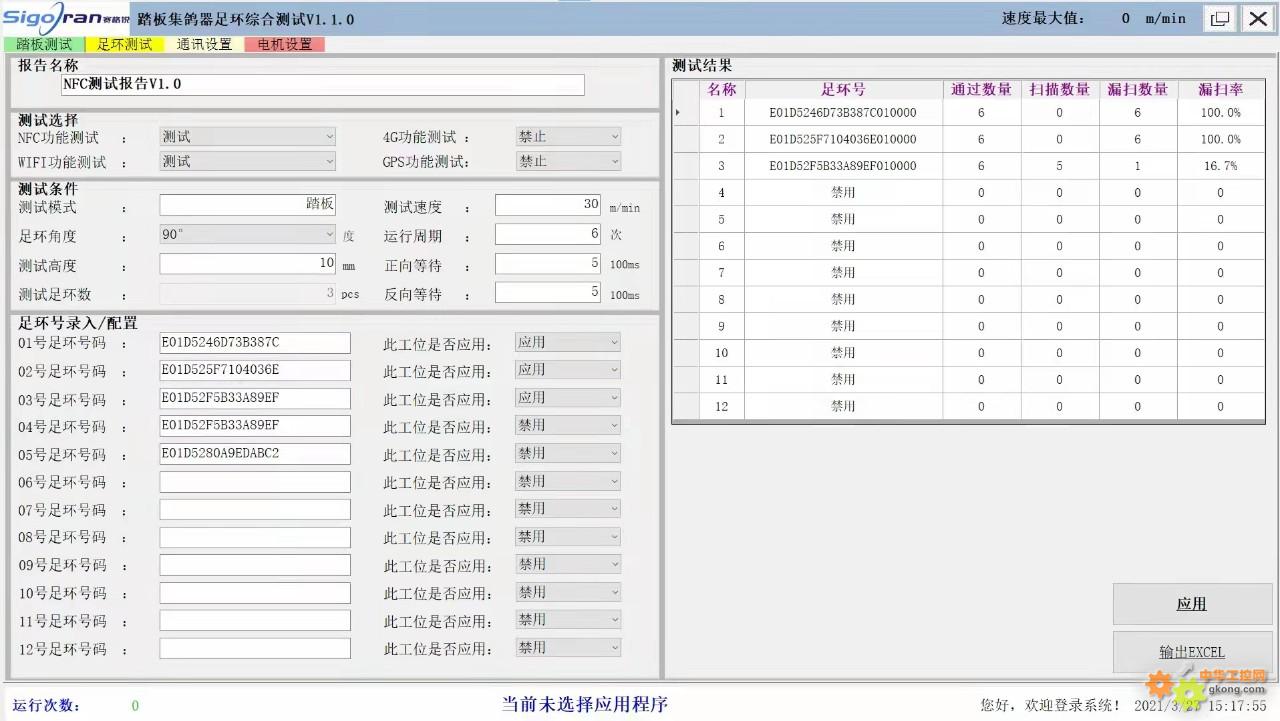
三、 踏板(集鸽器)、足环测试项说明:
1、踏板(集鸽器)模式:
(1)测试内容相同,但需要在协议中仅标识是两类设备即可。
(2):NFC测试项 :
单个足环漏扫率 = (单个足环总经过数量 - 踏板检测单足环总数量) / 单个足环总经过数量(百分百形式显示)。当前测试总漏扫率 = (足环总经过数量 - 踏板总检测数量) / 足环经过数量(百分百形式显示)。
(3):GPS测试项 :GPS模块工作状态。(指令在检测到NFC之后,有效)
(4):4G测试项 :此模块成功发送条数、发送失败条数(具体需与我方技术人员联系)。(指令在检测到NFC之后,有效)
(5):WIFI测试项:此模块成功发送条数、发送失败条数(具体需与我方技术人员联系)。(指令在检测到NFC之后,有效)
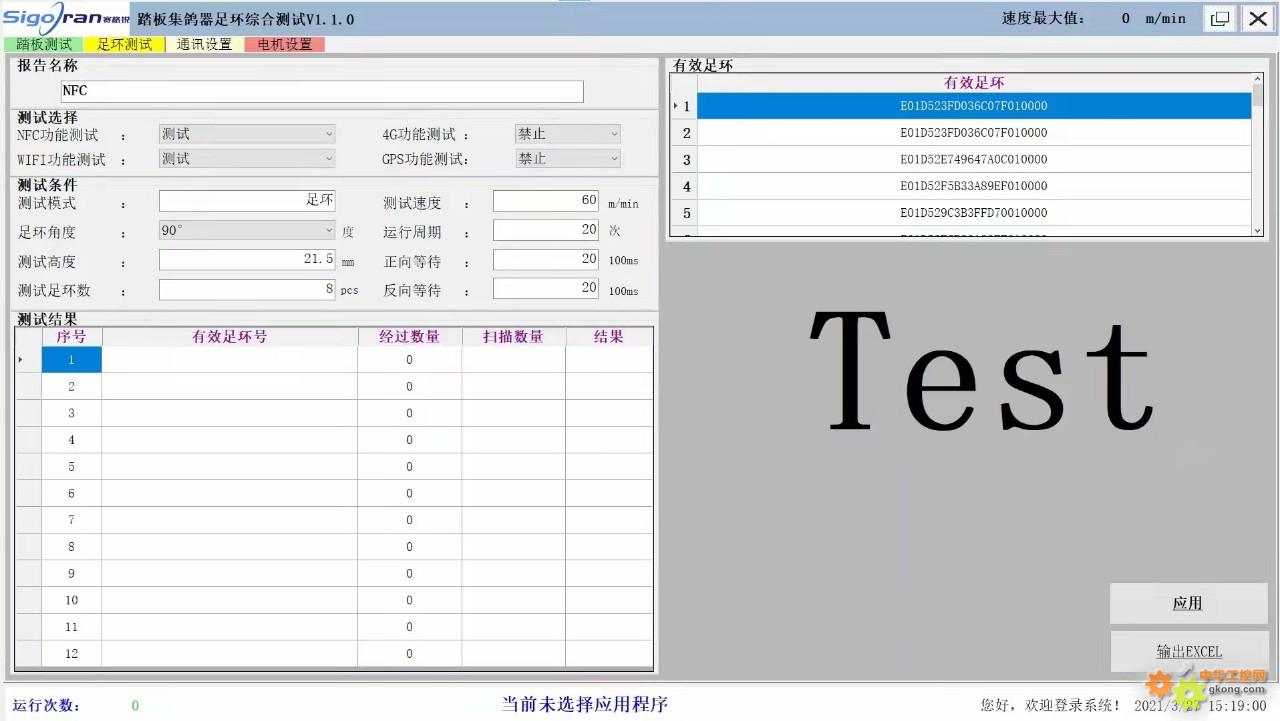
2、足环模式 :
(1):NFC测试项 : 启动一次测试及结束后pc直接显示成功与否(扫描到的总次数和实际应该被扫到的次数相等)以足环号,并且实时将识别出来的足环数据保存到报告文件中。按下测试完成按钮后,生成一份测试报告。
例子:如我单次放置三个足环(A、B、C)。设定按下开始按钮后,设备运行一个来回,这样的话,正常情况A、B、C三个足环分别应该被扫到 3*2 = 6 次。此时,在界面分别显示出A、B、C三个足环号,并分别显示出这三个足环都扫描出来了几次。如果这个过程结束,数据完全匹配,则界面出现绿色pass提示,否则出现红色fail提示,同时将成功的数据保存到报告中,失败的测试项不予保存(报告中保存的均为测试通过的足环信息)。
四、测试产品
![附件 足环.jpg]()
![附件 踏板.jpg]()
五、测试设备
![附件 设备.jpg]() 六、测试上位机软件画面
六、测试上位机软件画面
![附件 面1.jpg]()
![附件 面2.jpg]()
![附件 面3.jpg]()
![附件 面4.jpg]()
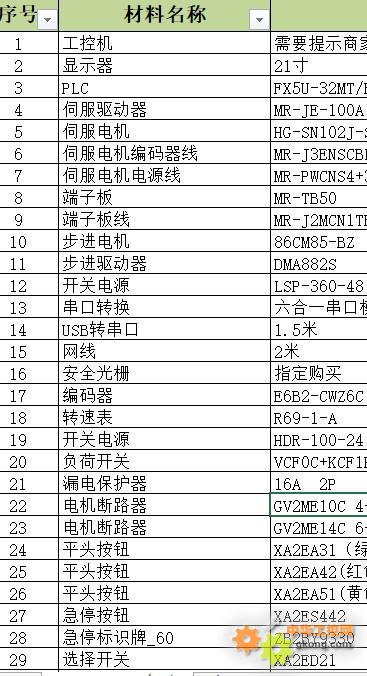
七、部分资材
![附件 资材.jpg]() 八、 个人总结
八、 个人总结
1、上位机与PLC通讯,(这个项目没有使用运动控制卡,所以采用PLC控制2台伺服电机及部分I/O)。
2、产品与上位机采用串口通讯,采用CRC校验。
3、产品以每秒2米的移动速度,反复经过采集器。(为了防止外部的干扰,采集器四周在有效的距离内不能有金属,所以采用了塑料螺栓),所以结构的稳定性还要后期观察。
4、控制功能比较简单,主要的难点在于数据的处理和保存(还好与客户沟通的比较顺畅,客户的食堂真是绝对的赞)。
1、 踏板/集鸽器模式 操作预想流程:
(1):将模板上人工放置足环,人工调节设备高度。
(2):设备上电,修改基本配置参数.
(3):按下设备复位按钮,设备复位(回到原点)。
(4):按下设备开始按钮,设备开始运行。
(5):设备运行到设定周期次数后,停止运行,在PC显示测试结果,并生成测试报告(运行过程中需要实时存储),并配有红绿指示灯(绿色代表测试成功,红色代表测试失败。
(6):若临时需要停止运行设备,但设备未到达预定运行次数时,测试人员可通过按下设备停止按钮,设备停止运行,PC显示截至到当前停止时刻的测试结果,生成测试报告及过程数据(运行过程中需要实时存储),并配有红绿指示(绿色代表测试成功,红色代表测试失败)。
2、 足环模式 操作预想流程:
(1):将模板上人工预放置第一批足环,人工调节设备高度。
(2):设备上电,修改基本配置参数。
(3):按下设备复位按钮,设备复位(回到原点)。
(4):按下设备开始按钮,设备开始运行。
(5):设备运行到设定周期次数后,停止运行,在PC显示测试结果(大面积红绿色pass fail),配有红绿指示灯(绿色代表测试成功,红色代表测试失败),成功失败结果需与我方开发人员沟通。
(6):人工更换测试足环。
(7):重复4~6动作。
(8):人工按下测试完成按钮,在PC生成测试报告(运行过程中需要实时存储)。
二、 PC页面配置功能需求:
(1):端口配置、波特率、奇偶校验、停止位、开关串口。
(2):模式选择:踏板(集鸽器)测试模式(具体测试项目如下所示,可配置是否测试)、足环测试模式(具体测试项目如下所示)。
(3):当前测试报告名称 (人工手动输入)加PC实时时间。
(4):足环角度数据(人工手动更换不同的模板)。
(5):实际调节的设备测试高度参数,足环距离被测试踏板的高位为0~30cm,高度可调,设备上要有调节刻度尺(人工手动调节设备的数据)。
(6):设定运行速度,最高为2.0M/S(人工输入参数,设备自动调节)。
(7):运行周期次数(人工输入参数,设备自动调节)。
(8):单运行周期内静止等待时间(正方向)(人工输入参数,设备自动调节)。
(9):单运行周期内静止等待时间(反方向)(人工输入参数,设备自动调节)。
(10):当前托盘模板中放置的足环总数,最多数量为12个(人工手动输入)。
(11):在踏板(集鸽器)测试模式下,需额外配置最多12个足环信息(单个足环信息占用16字节),同时可配置是否工作。
三、 踏板(集鸽器)、足环测试项说明:
1、踏板(集鸽器)模式:
(1)测试内容相同,但需要在协议中仅标识是两类设备即可。
(2):NFC测试项 :
单个足环漏扫率 = (单个足环总经过数量 - 踏板检测单足环总数量) / 单个足环总经过数量(百分百形式显示)。当前测试总漏扫率 = (足环总经过数量 - 踏板总检测数量) / 足环经过数量(百分百形式显示)。
(3):GPS测试项 :GPS模块工作状态。(指令在检测到NFC之后,有效)
(4):4G测试项 :此模块成功发送条数、发送失败条数(具体需与我方技术人员联系)。(指令在检测到NFC之后,有效)
(5):WIFI测试项:此模块成功发送条数、发送失败条数(具体需与我方技术人员联系)。(指令在检测到NFC之后,有效)
2、足环模式 :
(1):NFC测试项 : 启动一次测试及结束后pc直接显示成功与否(扫描到的总次数和实际应该被扫到的次数相等)以足环号,并且实时将识别出来的足环数据保存到报告文件中。按下测试完成按钮后,生成一份测试报告。
例子:如我单次放置三个足环(A、B、C)。设定按下开始按钮后,设备运行一个来回,这样的话,正常情况A、B、C三个足环分别应该被扫到 3*2 = 6 次。此时,在界面分别显示出A、B、C三个足环号,并分别显示出这三个足环都扫描出来了几次。如果这个过程结束,数据完全匹配,则界面出现绿色pass提示,否则出现红色fail提示,同时将成功的数据保存到报告中,失败的测试项不予保存(报告中保存的均为测试通过的足环信息)。
四、测试产品


五、测试设备



七、部分资材
1、上位机与PLC通讯,(这个项目没有使用运动控制卡,所以采用PLC控制2台伺服电机及部分I/O)。
2、产品与上位机采用串口通讯,采用CRC校验。
3、产品以每秒2米的移动速度,反复经过采集器。(为了防止外部的干扰,采集器四周在有效的距离内不能有金属,所以采用了塑料螺栓),所以结构的稳定性还要后期观察。
4、控制功能比较简单,主要的难点在于数据的处理和保存(还好与客户沟通的比较顺畅,客户的食堂真是绝对的赞)。
[此贴子已经被作者于2021/11/17 11:59:16编辑过]
