














发表于:2021/10/26 18:09:14
#0楼
客户需求为使用canopen转profinet网关将伺服驱动器RoboteQ驱动器数据接入西门子PLC之中,使用设备为西门子PLC一台(支持profinet协议) CANopen转Profinet网关YT-PN-02一台,RoboteQ驱动器一台。
CANopen转Profinet网关分为两部分配置:一部分为西门子编程软件博图上面的数据配置,另一部分的配置是canopen网关配置工具上的数据配置。
下面是西门子编程软件博图上面的数据配置步骤:
1. 打开西门子PLC组态软件(STEP7,博图等)
配置新项目
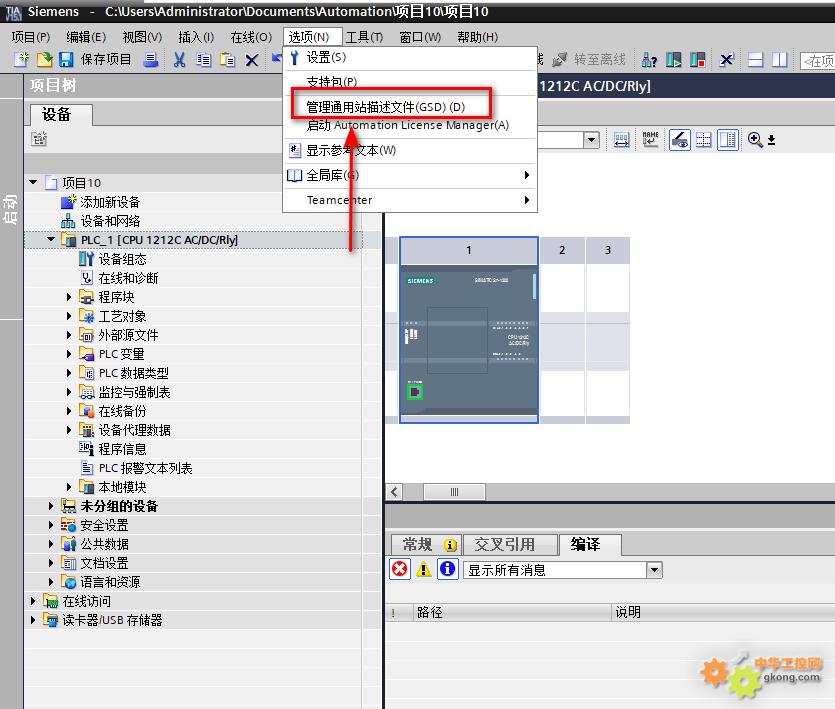
安装gsd文件
![附件 图片1.jpg]()
选择gsd文件所在位置(本例为桌面)导入后选择安装
![附件 图片2.jpg]()
2. 配置profinet参数
先添加CANopen转Profinet网关YT-PN-02,选择YT-PN-02
![附件 图片3.jpg]()
3. 设置CANopen转Profinet网关YT-PN-02的设备名称和IP地址(网关配置软件处的名称和IP地址要与这里保持一致)
![附件 图片4.jpg]()
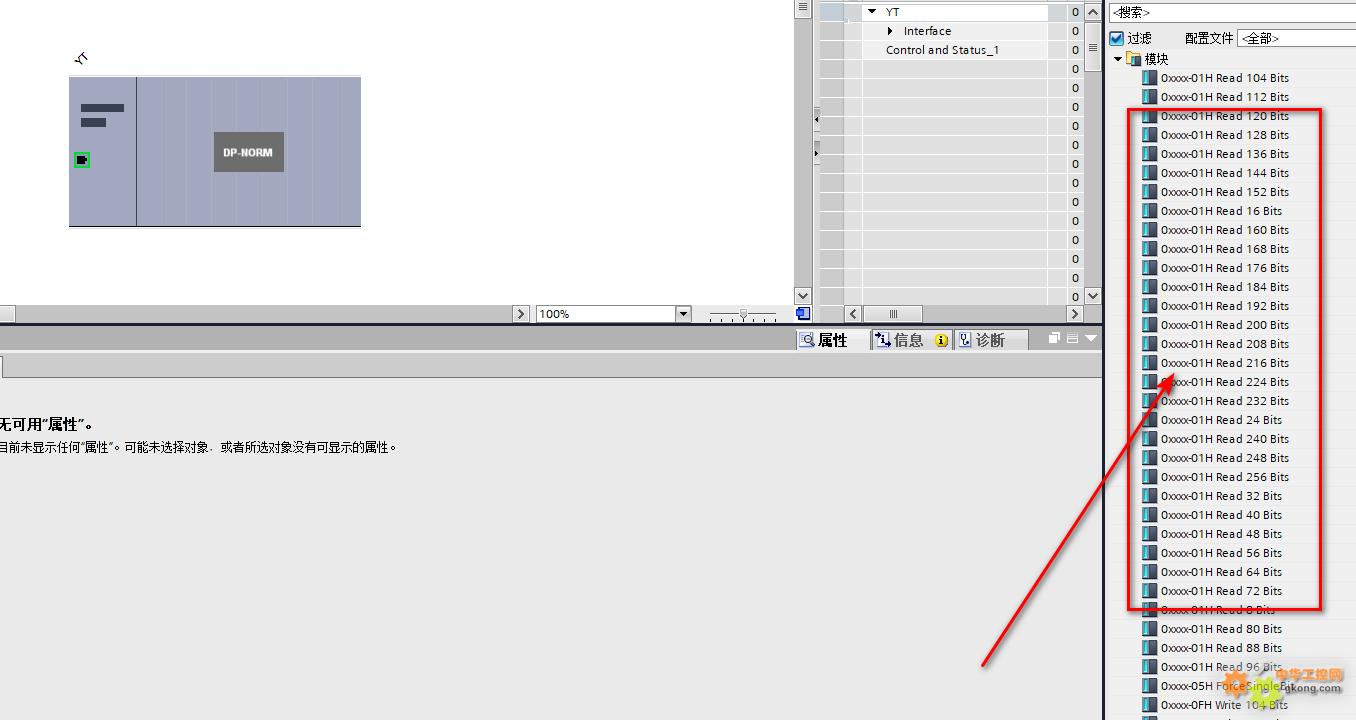
4. 添加数据的输入输出总长度(本例配置了8个字节输入)
![附件 图片5.jpg]()
5. 编译下载组态
6. 配置canopen转profinet网关YT-PN-02参数
先导入eds文件
![附件 图片6.jpg]()
7. 添加canopen主从设备(本例从站ID为3)
![附件 图片7.jpg]()
8. 设置主站参数波特率和从站保持一致,本例为125K
![附件 图片8.jpg]()
9. 设置网关IP地址和设备名称(需要和博图组态中保持一致)
![附件 图片9.jpg]()
10. 配置从站参数
如配置心跳到TPDO2,ID为383
11. 点击生成下载
12. 将网关重新上电,将自动接入西门子网络。
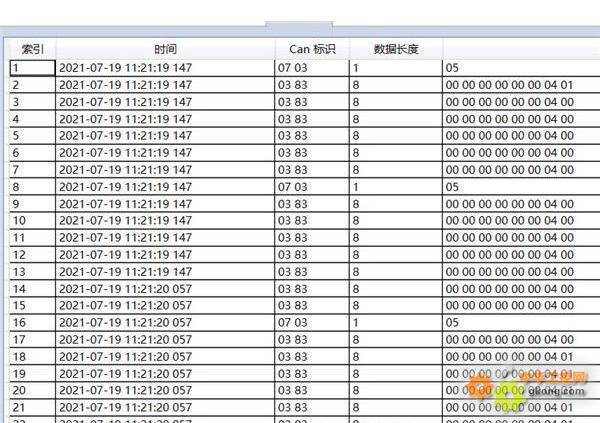
13. 监控对应地址(此参数大小为四个字节)通道偏移设为0的时候数据将映射到PLC的ID68并依此往后排列。
![附件 图片11.jpg]()
![附件 图片12.jpg]()
至此移通创联CANopen转Profinet网关YT-PN-02连伺服驱动器RoboteQ的配置已经完成。
![附件 图片10.jpg]()
CANopen转Profinet网关分为两部分配置:一部分为西门子编程软件博图上面的数据配置,另一部分的配置是canopen网关配置工具上的数据配置。
下面是西门子编程软件博图上面的数据配置步骤:
1. 打开西门子PLC组态软件(STEP7,博图等)
配置新项目
安装gsd文件
选择gsd文件所在位置(本例为桌面)导入后选择安装

2. 配置profinet参数
先添加CANopen转Profinet网关YT-PN-02,选择YT-PN-02

3. 设置CANopen转Profinet网关YT-PN-02的设备名称和IP地址(网关配置软件处的名称和IP地址要与这里保持一致)

4. 添加数据的输入输出总长度(本例配置了8个字节输入)
5. 编译下载组态
6. 配置canopen转profinet网关YT-PN-02参数
先导入eds文件

7. 添加canopen主从设备(本例从站ID为3)

8. 设置主站参数波特率和从站保持一致,本例为125K

9. 设置网关IP地址和设备名称(需要和博图组态中保持一致)

10. 配置从站参数
如配置心跳到TPDO2,ID为383
11. 点击生成下载
12. 将网关重新上电,将自动接入西门子网络。
13. 监控对应地址(此参数大小为四个字节)通道偏移设为0的时候数据将映射到PLC的ID68并依此往后排列。

至此移通创联CANopen转Profinet网关YT-PN-02连伺服驱动器RoboteQ的配置已经完成。

[此贴子已经被jint于2021/10/27 9:00:10编辑过]