














发表于:2021/4/19 18:27:59
#0楼
随着甲方对设备速度,机械寿命,系统稳定性等有了更高的要求,而传统的梯形加减速,七段S型曲线等再高速运动的过程中经常出现冲击电流等问题,对机械损耗也较大,所以乙方很有必要对控制算法进行一番研究。
本研究基于三菱简单运动模块RD77MS16(同样使用与LD77MS/QD77MS/FX-40SSC-S/FX-80SSC-S),该模块内置有12种凸轮特性曲线可供选择,此次选择常用的恒加速度(梯形加减速),单弦(正弦/S曲线加减速)和五次曲线进行实验。
一、效果展示
先来看下不同曲线下动作效果图。
①线性匀速运动效果
![附件 匀速直线曲线.gif]()
②恒加速度(梯形加减速)的缓动前半段从0开始加速,后半段减速到0的缓动
![附件 梯形加减速曲线.gif]()
③单弦(正弦/S曲线加减速)的缓动前半段从0开始加速,后半段减速到0的缓动
![附件 正弦加减速曲线.gif]()
④五次曲线的缓动前半段从0开始加速,后半段减速到0的缓动
![附件 五次加减速曲线.gif]()
二、曲线特性
机械运动中,速度和加速度曲线的不平滑对电机和机械机构会产生冲击, 电机最大输出电流增大, 高速下的系统稳定性变弱, 加加速度的不连续性又会加大对机械的磨损速度 ,所以符合速度和加速度的连续性和平滑性的曲线才是我们所需要的。接下来我们设计一条往复运动,从0开始加速的凸轮曲线,分解其在不同加减速效果下,分析其位移/速度/加速度随时间的变化。
![附件 运动轨迹示意图.jpg]()
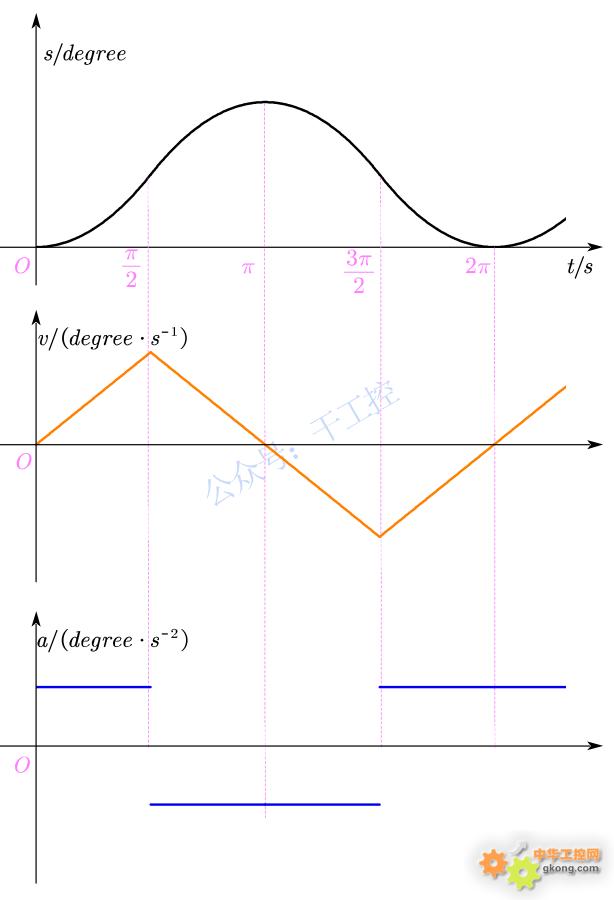
①常用的梯形加减速位移,速度,加速度随时间变化关系如下,可以看出速度呈连续性变化而加速度的变化不是连续的,加速度在0,π/2,3π/2处发生突变,说明有明显的“冲击”现象,在实际应用中会减少凸轮寿命和影响机构正常运作;
![附件 梯形加减速.jpg]()
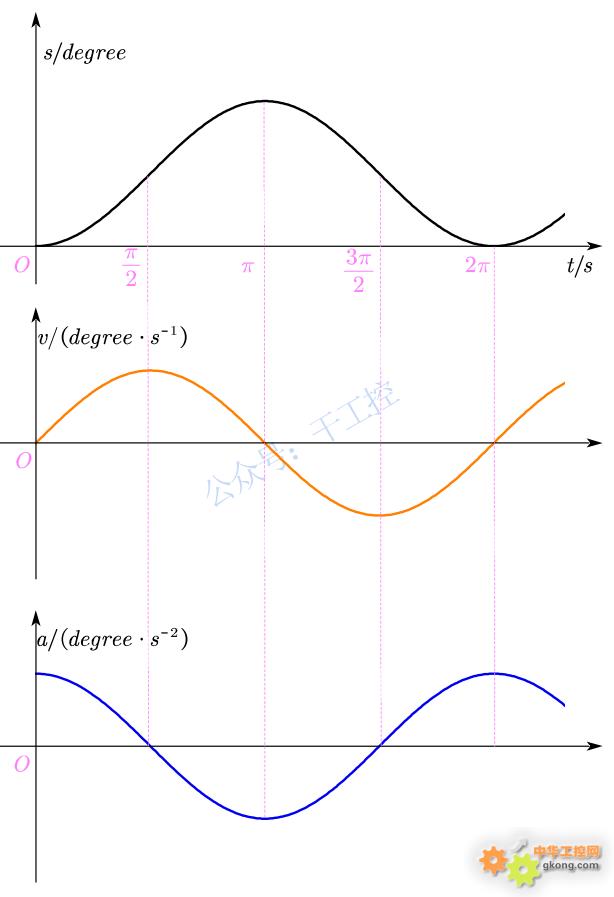
②S曲线加减速位移,速度,加速度随时间变化关系如下,其速度和加速度相比梯形变化更加柔和,但在启动和停止时加速度并不为0,还是存在冲击现象;
![附件 S曲线加减速.jpg]()
③五次曲线位移,速度,加速度随时间变化关系如下,可以看出整个过程的加速度和加加速度不仅连续而且其本身也是多项式函数, 曲线各点实现了平滑性过度。
![附件 五次曲线加减速.jpg]()
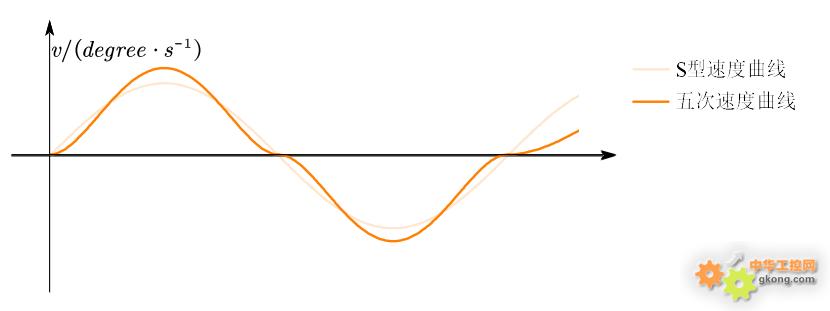
对比S型的速度曲线和五次的速度曲线,可以看出五次在启动和停止阶段更为柔和,可能是我们所需要的丝滑的曲线。
![附件 S曲线五次速度对比.jpg]()
三、程序调试
通过简单运动简单运动模块分别生成对应的凸轮曲线,然后测试不用凸轮曲线下伺服电机的电流变化,来验证五次曲线的合理性(未完待续)。
四、源码分享
非常感谢你能看到这里,如果你觉得这篇文章写的还不错的话,求赞求关注求转发。
资料在附件,欢迎下载使用。
本研究基于三菱简单运动模块RD77MS16(同样使用与LD77MS/QD77MS/FX-40SSC-S/FX-80SSC-S),该模块内置有12种凸轮特性曲线可供选择,此次选择常用的恒加速度(梯形加减速),单弦(正弦/S曲线加减速)和五次曲线进行实验。
一、效果展示
先来看下不同曲线下动作效果图。
①线性匀速运动效果

②恒加速度(梯形加减速)的缓动前半段从0开始加速,后半段减速到0的缓动

③单弦(正弦/S曲线加减速)的缓动前半段从0开始加速,后半段减速到0的缓动

④五次曲线的缓动前半段从0开始加速,后半段减速到0的缓动

二、曲线特性
机械运动中,速度和加速度曲线的不平滑对电机和机械机构会产生冲击, 电机最大输出电流增大, 高速下的系统稳定性变弱, 加加速度的不连续性又会加大对机械的磨损速度 ,所以符合速度和加速度的连续性和平滑性的曲线才是我们所需要的。接下来我们设计一条往复运动,从0开始加速的凸轮曲线,分解其在不同加减速效果下,分析其位移/速度/加速度随时间的变化。

①常用的梯形加减速位移,速度,加速度随时间变化关系如下,可以看出速度呈连续性变化而加速度的变化不是连续的,加速度在0,π/2,3π/2处发生突变,说明有明显的“冲击”现象,在实际应用中会减少凸轮寿命和影响机构正常运作;
②S曲线加减速位移,速度,加速度随时间变化关系如下,其速度和加速度相比梯形变化更加柔和,但在启动和停止时加速度并不为0,还是存在冲击现象;
③五次曲线位移,速度,加速度随时间变化关系如下,可以看出整个过程的加速度和加加速度不仅连续而且其本身也是多项式函数, 曲线各点实现了平滑性过度。

对比S型的速度曲线和五次的速度曲线,可以看出五次在启动和停止阶段更为柔和,可能是我们所需要的丝滑的曲线。
三、程序调试
通过简单运动简单运动模块分别生成对应的凸轮曲线,然后测试不用凸轮曲线下伺服电机的电流变化,来验证五次曲线的合理性(未完待续)。
四、源码分享
非常感谢你能看到这里,如果你觉得这篇文章写的还不错的话,求赞求关注求转发。
资料在附件,欢迎下载使用。
附件:
[本地下载][此贴子已经被作者于2021/4/19 18:44:11编辑过]
