发表于:2021/3/8 10:46:25
#0楼
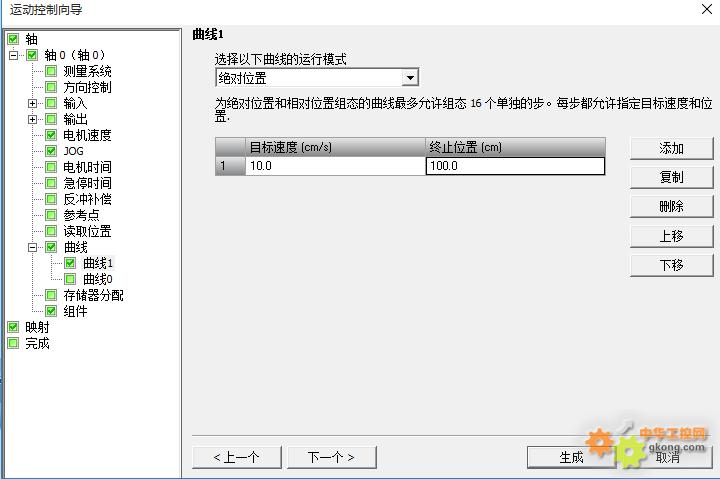
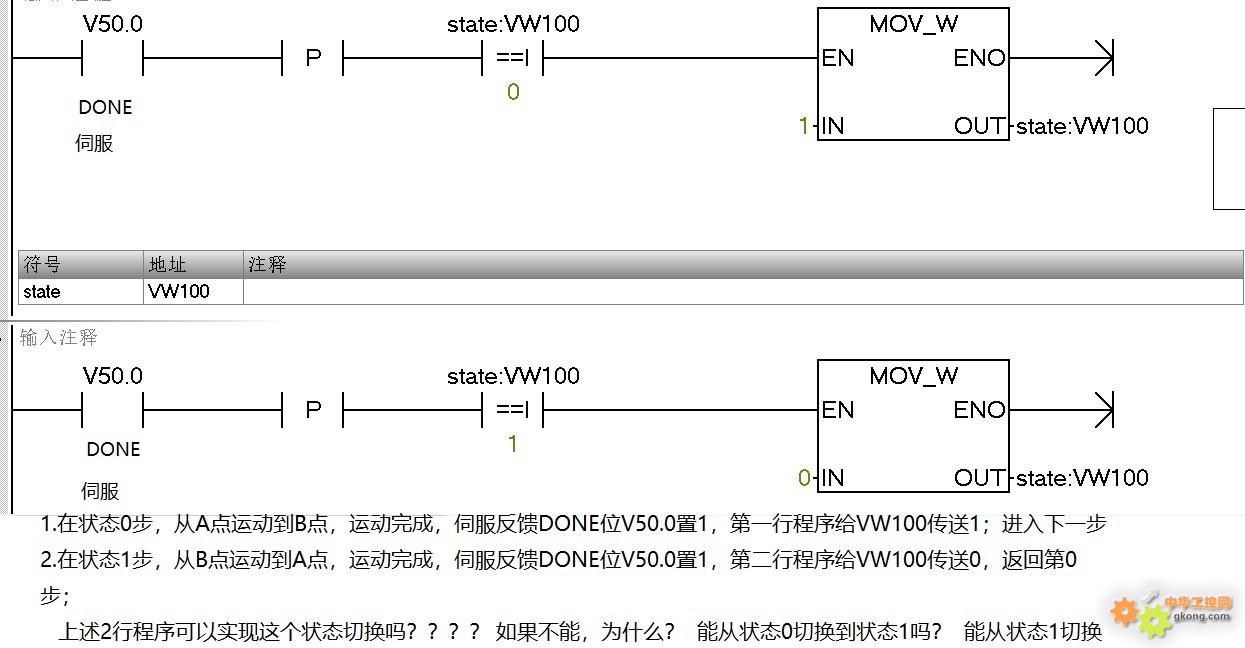
工艺要求是A点到B点之间来回运动, 状态一开始为0,然后从A点运动到B点,利用伺服完成位DONE的上升沿将状态变为1(vw100=1);
然后再从B点返回A点,利用利用goto指令驱动伺服完成位DONE的上升沿将状态变为0(vw100=0);
所以这里的伺服完成DONE位信号上升沿切换状态成了关键,程序就是2行,见图片,请大家指教这两行程序有什么问题,能否实现?为什么能实现?
如果不能实现,如何改进? 你觉得问题出现在哪里???
分析这个程序要深刻理解PLC程序的扫描逻辑
![附件 状态机转换.jpg]()
然后再从B点返回A点,利用利用goto指令驱动伺服完成位DONE的上升沿将状态变为0(vw100=0);
所以这里的伺服完成DONE位信号上升沿切换状态成了关键,程序就是2行,见图片,请大家指教这两行程序有什么问题,能否实现?为什么能实现?
如果不能实现,如何改进? 你觉得问题出现在哪里???
分析这个程序要深刻理解PLC程序的扫描逻辑
[此贴子已经被作者于2021/3/8 13:49:53编辑过]
机器视觉+ARM