













发表于:2020/5/17 15:52:41
#0楼
分享程序:西门子S7-200 SMART CPU USS 通信案例
一、准备:
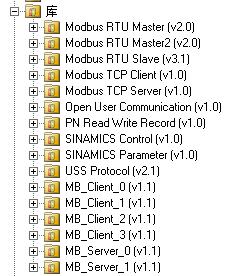
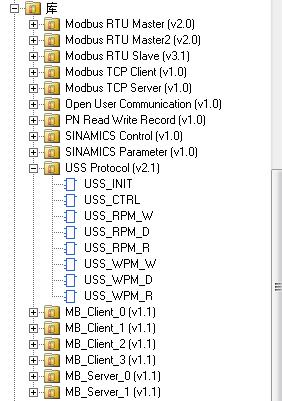
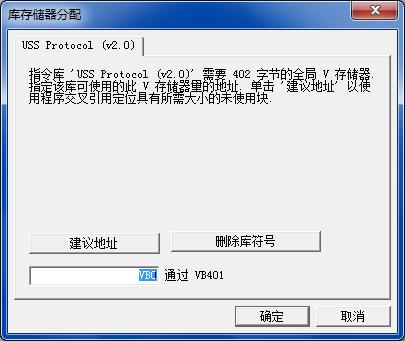
使用库和库存储区分配:
![附件 1.jpg]()
![附件 2.jpg]()
![附件 3.jpg]() 二、程序:
二、程序:
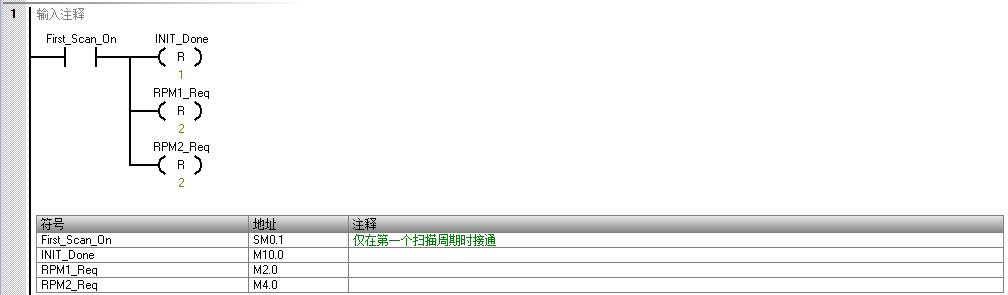
网络1:CPU 启动时复位各个 USS 指令的完成位和请求位
![附件 001.jpg]() 网络2:USS_INIT 指令 Done 完成位用于触发第一条 USS_RPM_R 指令的执行
网络2:USS_INIT 指令 Done 完成位用于触发第一条 USS_RPM_R 指令的执行
![附件 002.jpg]() 网络3:需要使用沿信号调用 USS_INIT 指令
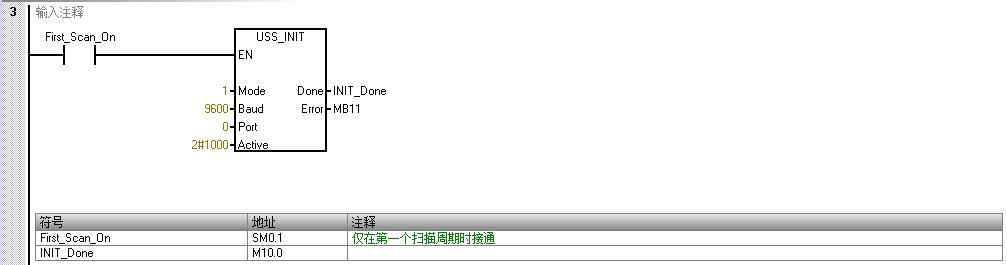
网络3:需要使用沿信号调用 USS_INIT 指令
使能 USS 通信;
通信波特率需要与 V20 的波特率相同;
站地址为 3 的 V20 需要在轮询地址表中激活。
![附件 003.jpg]() 网络4:需要使用 SM0.0 调用 USS_CTRL 指令
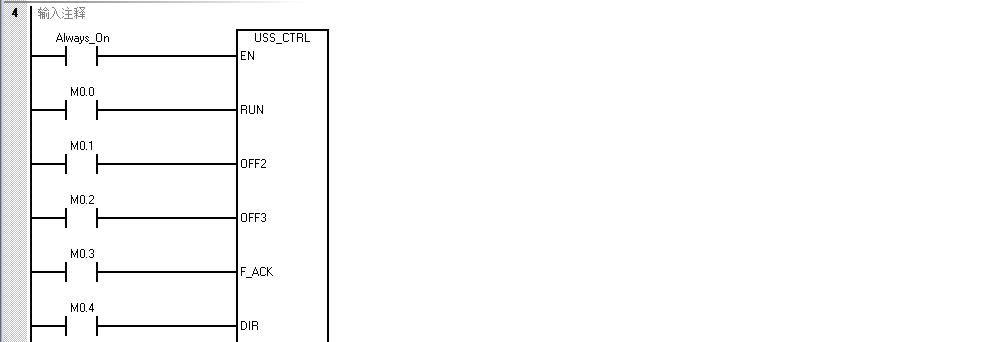
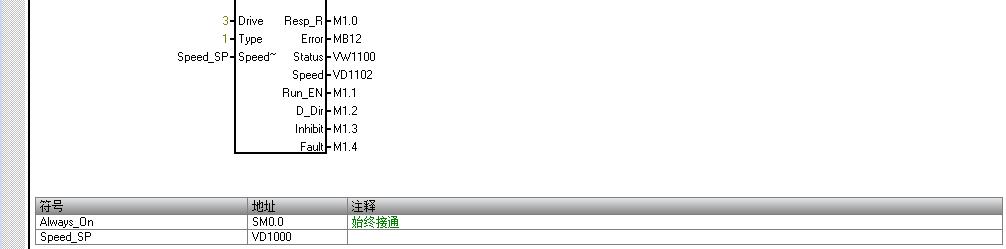
网络4:需要使用 SM0.0 调用 USS_CTRL 指令
变频器运行条件:
1、RUN = True;
2、OFF2 、OFF3 = False ;
3、Inhibit、Fault 输出为 False。
![附件 004-1.jpg]()
![附件 004-2.jpg]() 网络5:读取 SINAMICS V20 实际输出频率(r0024)
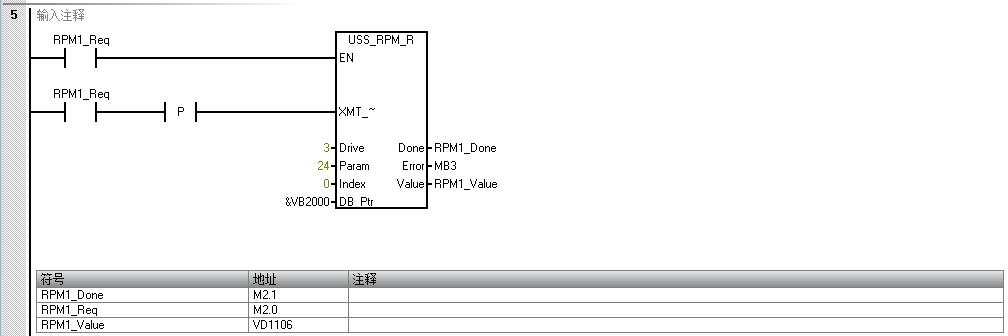
网络5:读取 SINAMICS V20 实际输出频率(r0024)
![附件 005.jpg]() 网络6:第一条 USS_RPM_x 指令操作完成时:
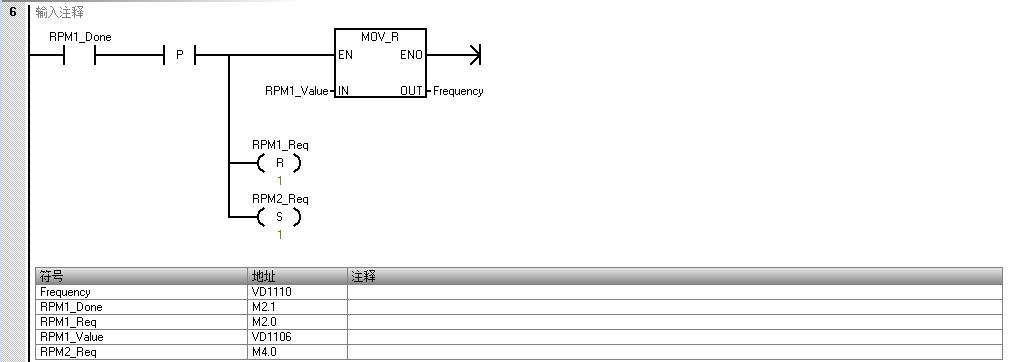
网络6:第一条 USS_RPM_x 指令操作完成时:
1、将读取的实际输出频率转移到其他 V 存储区,用于保持数据稳定。
2、复位第一条 USS_RPM_x 指令的 EN 参数,并置位 第二条 USS_RPM_x 指令的 EN 参数
![附件 006.jpg]() 网络7:读取 SINAMICS V20 实际输出电流(r0027)
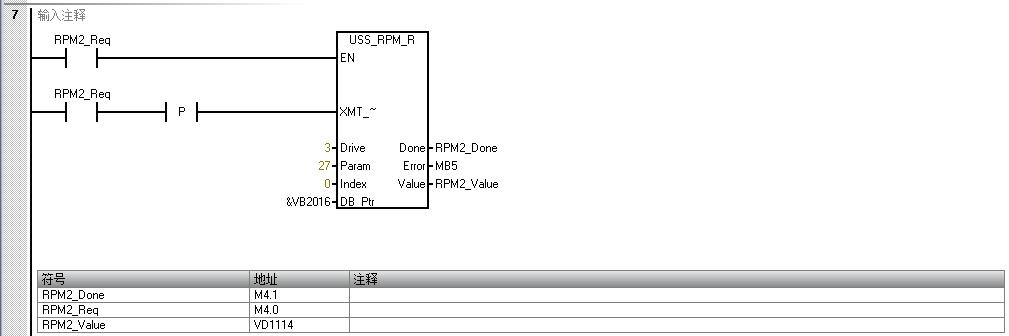
网络7:读取 SINAMICS V20 实际输出电流(r0027)
![附件 007.jpg]() 网络8:第二条 USS_RPM_x 指令操作完成时:
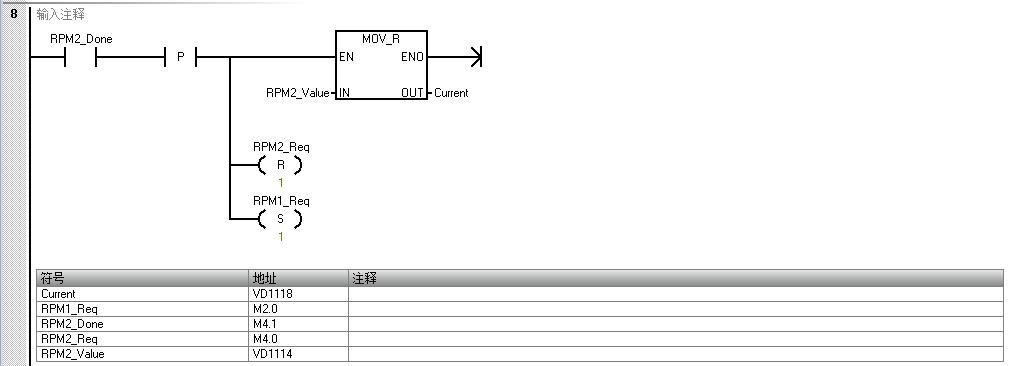
网络8:第二条 USS_RPM_x 指令操作完成时:
1、将读取的实际输出电流转移到其他 V 存储区,用于保持数据稳定。
2、复位第二条 USS_RPM_x 指令的 EN 参数,并置位第一条 USS_RPM_x 指令的 EN 参数
![附件 009.jpg]() 三、程序提供下载:
三、程序提供下载:
一、准备:
使用库和库存储区分配:
网络1:CPU 启动时复位各个 USS 指令的完成位和请求位

使能 USS 通信;
通信波特率需要与 V20 的波特率相同;
站地址为 3 的 V20 需要在轮询地址表中激活。
变频器运行条件:
1、RUN = True;
2、OFF2 、OFF3 = False ;
3、Inhibit、Fault 输出为 False。
1、将读取的实际输出频率转移到其他 V 存储区,用于保持数据稳定。
2、复位第一条 USS_RPM_x 指令的 EN 参数,并置位 第二条 USS_RPM_x 指令的 EN 参数
1、将读取的实际输出电流转移到其他 V 存储区,用于保持数据稳定。
2、复位第二条 USS_RPM_x 指令的 EN 参数,并置位第一条 USS_RPM_x 指令的 EN 参数
附件:
[本地下载]基于各种组态软件\触摸屏\PLC\单片机\变频器Modbus TCP\RTU\ASCII通信编程服务,需要请直接
联系!腾讯扣扣149034219
联系!腾讯扣扣149034219