发表于:2020/4/13 9:22:34
#0楼
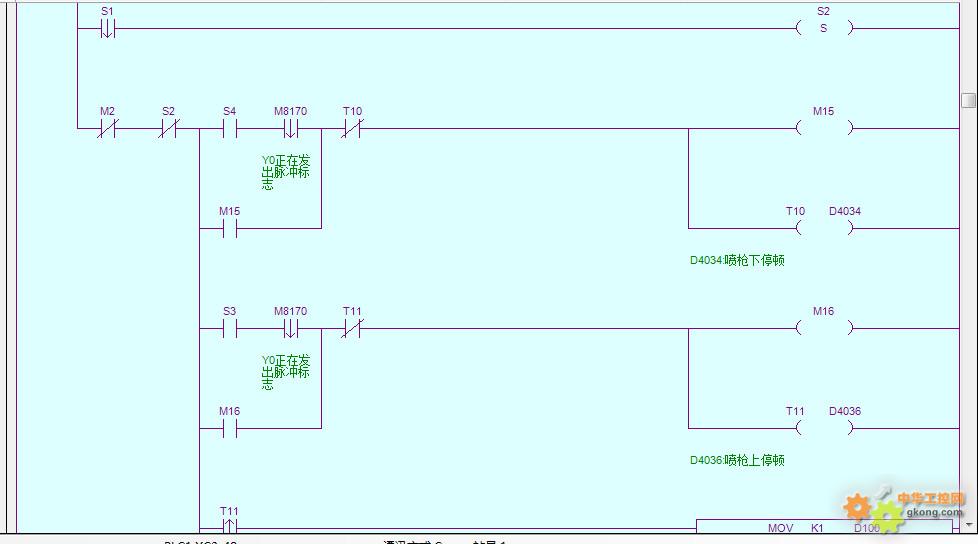
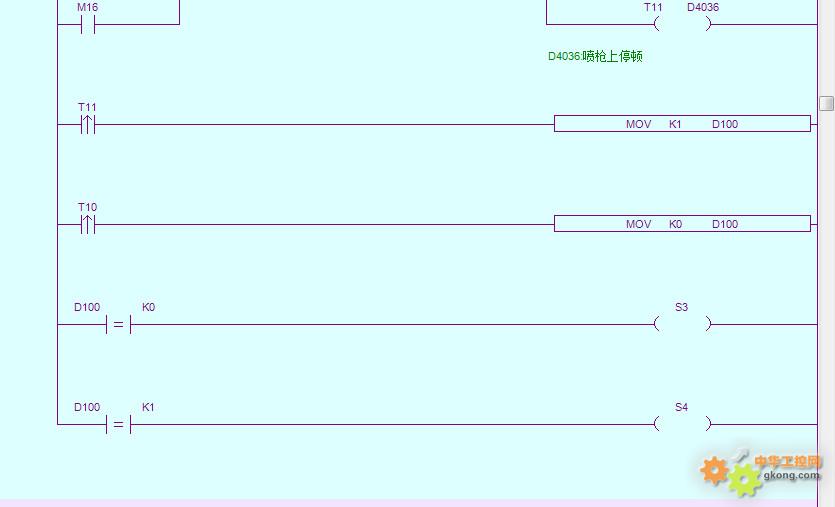
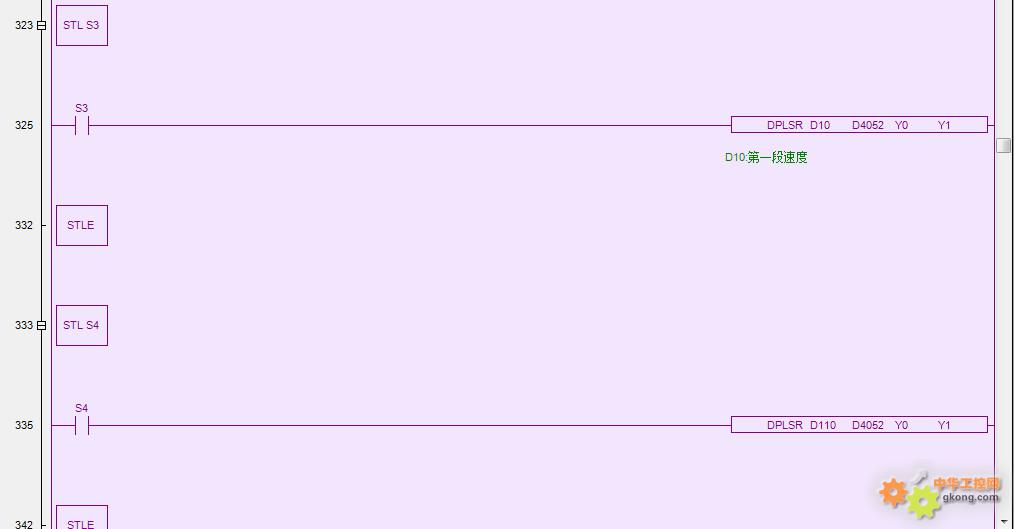
往复式升降机,用信捷的DPLSR指令,明明有加减速时间,为什么正反转切换的时候还是会顿一下,整个行程不是那种行云流水的感觉,很生硬,把伺服刚性调高了这个现象有所改善,伺服厂家说是我程序的问题,大家帮我看一下程序哪里不对,看了几天了。上下停顿时间都为0。![附件 1586740845(1).jpg]()
![附件 1586740872(1).jpg]()
![附件 1586740902(1).jpg]()