














发表于:2020/4/10 14:52:53
#0楼
实验名称:基于Hebb学习规则的压电陶瓷驱动器单神经元自适应磁滞补偿
研究方向:微纳定位
实验内容:压电陶瓷驱动器存在迟滞非线性,极大降低了其运动精度,由于其迟滞存在时变与非对称特征,增大了迟滞建模与补偿的难度。本实验使用单神经元自适应控制方法,对压电陶瓷驱动器的迟滞非线性进行在线补偿,从而提高压电陶瓷驱动器的轨迹跟踪性能。
测试目的:验证迟滞补偿算法的性能。
测试设备:dSPACE实时采集模块,动态桥式应变仪、高频功率放大器ATA-4052
实验过程:硬件连接与软件运行界面
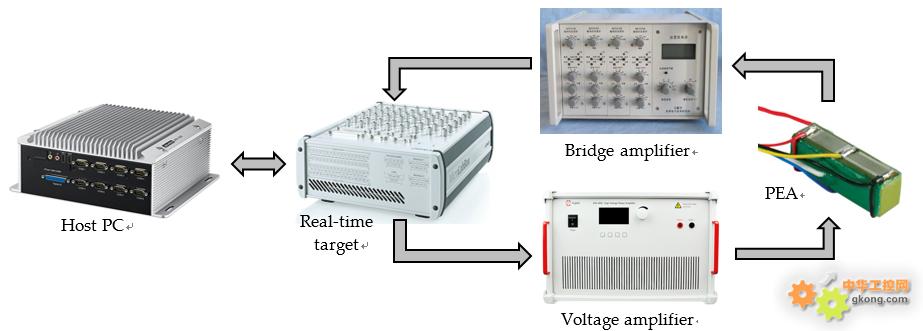
被测对象为Thorlabs公司生产的PZS001型压电陶瓷驱动器,在最大100V的驱动电压下,其最大位移为12.925μm。使用ATA-4052形放大器将控制压电放大为压电陶瓷驱动器的驱动电压。压电陶瓷驱动器上自带4个电阻应变片,组成一个4桥的电阻应变片。使用北戴河实用电子技术研究所生产的SDY2105型电桥放大器测量压电陶瓷驱动器的变形量。测试系统的硬件连接图如下所示:
![附件 6372211668760735317315308.jpg]() 测试程序在Matlab/Simulink下编写,通过dSPACE公司生产的Microlabbox型实时控制器运行测试程序。测试流程如下:首先在控制程序中生成0-10V的正弦信号,经过放大器放大之后驱动压电陶瓷驱动前前后运动,利用Microlabbox完成控制信号与位移信号的实时测量,并根据压电陶瓷的特性,编写单神经元自适应补偿算法,利用设备完成算法的性能测试。
测试程序在Matlab/Simulink下编写,通过dSPACE公司生产的Microlabbox型实时控制器运行测试程序。测试流程如下:首先在控制程序中生成0-10V的正弦信号,经过放大器放大之后驱动压电陶瓷驱动前前后运动,利用Microlabbox完成控制信号与位移信号的实时测量,并根据压电陶瓷的特性,编写单神经元自适应补偿算法,利用设备完成算法的性能测试。
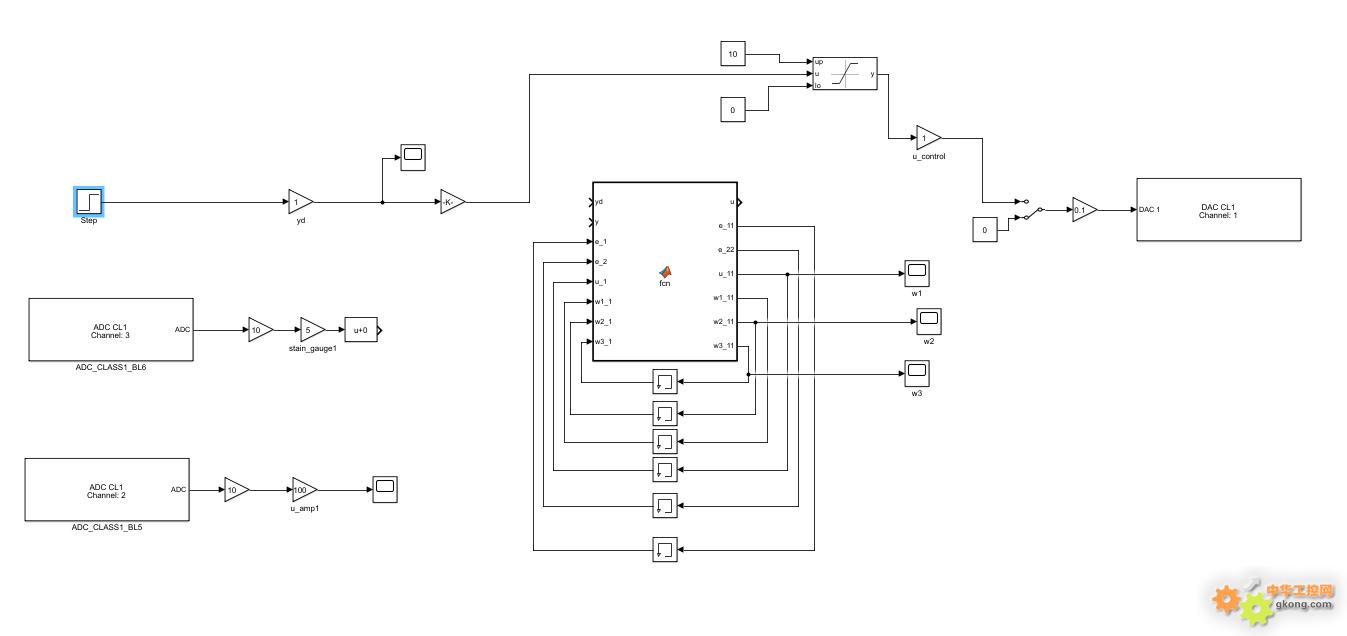
测试程序的Simulink代码如下图所示:![附件 6372211669792283953793112.jpg]() 测试结果:
测试结果:
![附件 6372211671148738674982111.jpg]()
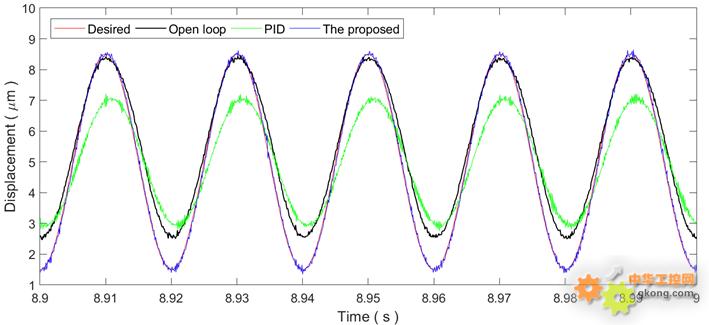
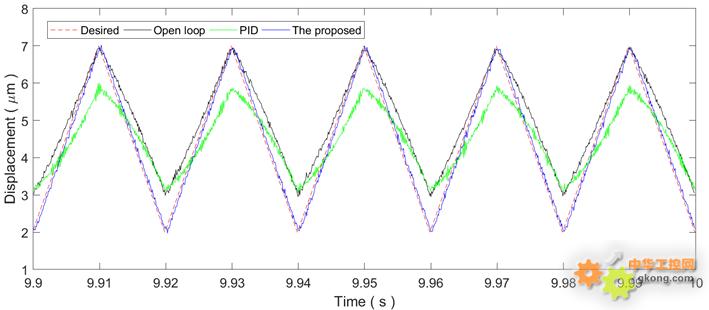
![附件 6372211672091909287603904.jpg]() 分别测试了控制算法在跟踪正弦轨迹与三角轨迹的效果,对于正弦轨迹,单神经元自适应补偿算法可以有效地消除迟滞非线性的影响,相对于传统的PID控制,单神经元自适应补偿算法具有更高的适应性和鲁棒性,对于50Hz以内的正弦轨迹,均能很好地消除迟滞非线性。对于三角轨迹,单神经元自适应补偿算法同样能够取得类似的效果。实验结果如下图所示:
分别测试了控制算法在跟踪正弦轨迹与三角轨迹的效果,对于正弦轨迹,单神经元自适应补偿算法可以有效地消除迟滞非线性的影响,相对于传统的PID控制,单神经元自适应补偿算法具有更高的适应性和鲁棒性,对于50Hz以内的正弦轨迹,均能很好地消除迟滞非线性。对于三角轨迹,单神经元自适应补偿算法同样能够取得类似的效果。实验结果如下图所示:
放大器在该实验中发挥的效能:
控制信号是弱电,其电压范围为0-10V,不足以驱动压电陶瓷驱动器。利用高频功率放大器将控制信号放大,生成驱动电压,从而驱动压电陶瓷。
研究方向:微纳定位
实验内容:压电陶瓷驱动器存在迟滞非线性,极大降低了其运动精度,由于其迟滞存在时变与非对称特征,增大了迟滞建模与补偿的难度。本实验使用单神经元自适应控制方法,对压电陶瓷驱动器的迟滞非线性进行在线补偿,从而提高压电陶瓷驱动器的轨迹跟踪性能。
测试目的:验证迟滞补偿算法的性能。
测试设备:dSPACE实时采集模块,动态桥式应变仪、高频功率放大器ATA-4052
实验过程:硬件连接与软件运行界面
被测对象为Thorlabs公司生产的PZS001型压电陶瓷驱动器,在最大100V的驱动电压下,其最大位移为12.925μm。使用ATA-4052形放大器将控制压电放大为压电陶瓷驱动器的驱动电压。压电陶瓷驱动器上自带4个电阻应变片,组成一个4桥的电阻应变片。使用北戴河实用电子技术研究所生产的SDY2105型电桥放大器测量压电陶瓷驱动器的变形量。测试系统的硬件连接图如下所示:
测试程序的Simulink代码如下图所示:
放大器在该实验中发挥的效能:
控制信号是弱电,其电压范围为0-10V,不足以驱动压电陶瓷驱动器。利用高频功率放大器将控制信号放大,生成驱动电压,从而驱动压电陶瓷。
[此贴子已经被作者于2020/4/10 14:55:33编辑过]