返回工控网首页
|
| 添加到收藏夹
中国自动化学会专家咨询工作委员会指定宣传媒体
免费注册
广告服务
|
客服中心
您现在所在的是:
机器人论坛
工控论坛首页
→
机器人论坛
→ 浏览主题:
编织袋码垛技术分享
回帖:
18
个,阅读:
2430
次
[上一页]
[1]
[2]
[下一页]
* 帖子主题:
编织袋码垛技术分享
收藏
分享到
1402
山谷
文章数:
206
年度积分:
50
历史总积分:
1402
作者的所有帖子(206)
注册时间:
2016/12/8
发站内信
发表于:2020/1/3 8:53:53
#10楼
回复 #6楼 蛇会大学
以入口点作为基准点,每一包都是在入口点的基础上进行偏移。
【方案】
CNC | 三菱电机DRC(Direct Robot Control)功能详解
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1402
山谷
文章数:
206
年度积分:
50
历史总积分:
1402
作者的所有帖子(206)
注册时间:
2016/12/8
发站内信
发表于:2020/1/3 9:04:48
#11楼
回复 #9楼 fuhuafeng72
不同应用场合,对机器的精度要求不一样。
如果是简单的搬运、码垛、机床上下料等场合,无论是精度还是稳定性,好多国产机器人都已能很好胜任了。
对精度、速度、稳定性等要求很高的场合,建议还是用大品牌的机器人较好。
这两条自动线的码垛,都是已入口点作为基准点,然后用偏移指令,把每一垛的坐标算出来的,纯逻辑处理,没有用码垛工艺。
【方案】
【产品技术分享专栏】ABB变频器对于多泵系统的几种控制方式
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
19927
产品体验中心会员
fuhuafeng72
文章数:
5623
年度积分:
169
历史总积分:
19927
作者的所有帖子(5623)
注册时间:
2011/11/21
发站内信
2017国庆活动(三)
2016国庆活动(三)
2014逛工博
发表于:2020/1/3 9:19:21
#12楼
回复 #11楼 山谷
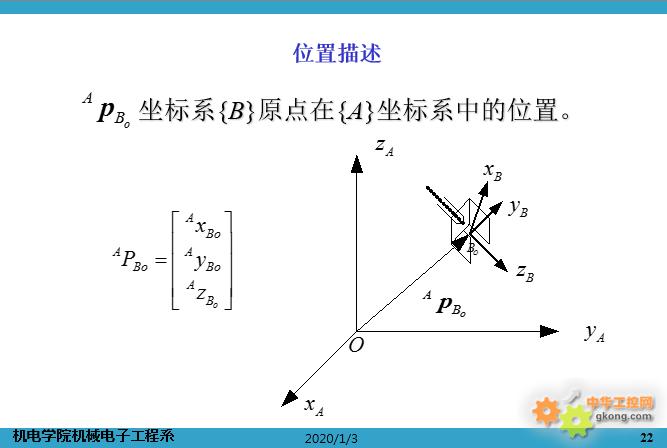
你没有看懂我的意思,我的意思是,码垛的空间坐标是如何运算的具体到工程应用上,如何才能既快又准地实现空间坐标的运算。所谓精度,国内无需考虑,根本问题是空间坐标运算工艺问题。
这个刚体、关节、手抓坐标算法问题,你们有相关产品的自主知识产权吗?
凯成、日发、攀峰龙带式帘子线倍捻机、直捻机电控系统维修改造。
【方案】
倍福 | XTS 系统显著提升了饮料包装生产的灵活性和性能
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
3493
q616602675
文章数:
371
年度积分:
94
历史总积分:
3493
作者的所有帖子(371)
注册时间:
2018/2/2
发站内信
发表于:2020/1/3 9:24:40
#13楼
一个叠栈指令就搞定了
【方案】
倍福基于 PC 的控制技术助力追踪标签规模化生产
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
1402
山谷
文章数:
206
年度积分:
50
历史总积分:
1402
作者的所有帖子(206)
注册时间:
2016/12/8
发站内信
发表于:2020/1/4 11:56:55
#14楼
回复 #12楼 fuhuafeng72
您好,本人不是做机器人控制器研发工作的,所以无法回答您提出的那些深奥问题。
一直以来,我都是做自动线的,属于设备组合应用的范畴。
用过多种机器人,本人不喜欢用码垛工艺包,而是喜欢自己写逻辑,用偏移指令实现码垛。
用码垛工艺做码垛,虽然简单,但灵活性不够,无法很好地修正每一垛的坐标。
用偏移指令写逻辑,则可以把每一垛的坐标都校对得非常精准。哪怕日后某一垛的坐标有偏差,都可以独立校对该垛坐标,而完全不影响其它垛的坐标。
同时,程序的移植性非常好。
【方案】
FA技术 | MR-J5系列伺服低通滤波器功能
只看该作者
|
赞
[1]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
19927
产品体验中心会员
fuhuafeng72
文章数:
5623
年度积分:
169
历史总积分:
19927
作者的所有帖子(5623)
注册时间:
2011/11/21
发站内信
2017国庆活动(三)
2016国庆活动(三)
2014逛工博
发表于:2020/1/4 12:08:29
#15楼
回复 #14楼 山谷
严格的说,你只是开汽车(机器人)(驾驶员),与做汽车(机器人),没有太大关系。
凯成、日发、攀峰龙带式帘子线倍捻机、直捻机电控系统维修改造。
【方案】
太阳能电池板空中检测与诊断
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
50
heroop
文章数:
24
年度积分:
50
历史总积分:
50
作者的所有帖子(24)
注册时间:
2019/11/30
发站内信
发表于:2020/3/11 22:37:43
#16楼
回复 #15楼 fuhuafeng72
你的意思是不是只设几个外部参数就自动开始码垛了,而楼主的是笨方法每一包都有坐标,如果换机器人位置的话楼主得重新设一遍,而如果有算法的话只需要设定起始地点终点,以及物料参数就行了
【方案】
华北工控ATX-6157工业主板,大数据可视化平台的理想选择
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
50
13004512497
文章数:
40
年度积分:
50
历史总积分:
50
作者的所有帖子(40)
注册时间:
2020/6/2
发站内信
发表于:2020/6/13 4:08:25
#17楼
不错了,顶一下
【方案】
精彩视频 | Smyczek:倍福用于前道生产的现代化设备
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
3493
q616602675
文章数:
371
年度积分:
94
历史总积分:
3493
作者的所有帖子(371)
注册时间:
2018/2/2
发站内信
发表于:2020/6/13 21:59:57
#18楼
点与点之间用些CNT平顺一些
【方案】
CNC | 丝杆热补偿功能应用
只看该作者
|
赞
[0]
|
踩
[0]
|
引用
|
回复
|
编辑
|
推荐
|
举报
|
管理
工控学堂推荐视频:
PLC学习视频
变频器学习视频
西门子学习视频
三菱学习视频
更多学习视频>>
•
[视频课程]电工进阶电气工程师的一百种可能
•
[视频课程]你还不会电机正反转电路吗
•
[视频课程]三节课掌握星三角程序编写
•
[视频课程]电工如何快速入门PLC
•
[视频课程]十年老电工实操系列之从小白到超越中级
•
[视频课程]低压电工考证实操教程之电机控制接线实操
•
[视频课程]应用中的电动机控制与保护元器件选择
•
[视频课程]老司机带你玩转电工仪器仪表
•
[视频课程]电工操作证实操--科目二
78.0005