发表于:2019/11/23 23:00:46
#0楼
本贴内容来自<120例>1.5.5章节
这个案例挺好用的
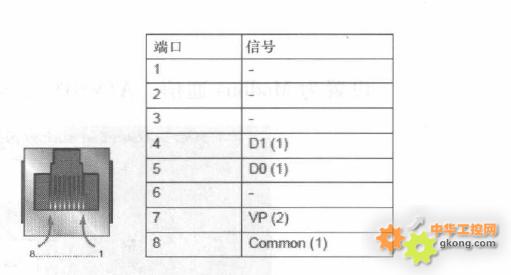
ATV303通信端口定义如图
![附件 1.jpg]()
M2X8与ATV303的通信接线:
D1........4
D0........5
GND.......8
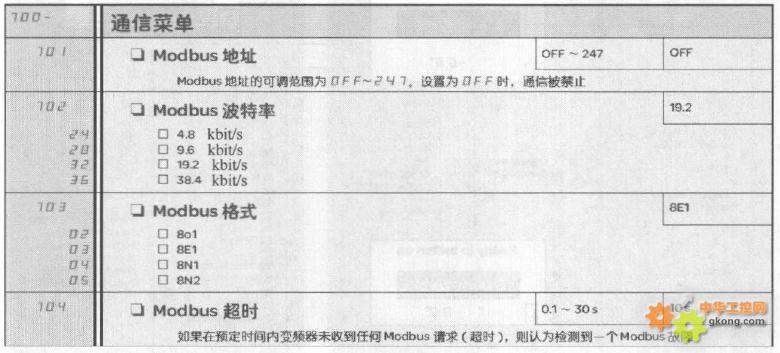
ATV303通信参数设置如图
![附件 2.jpg]()
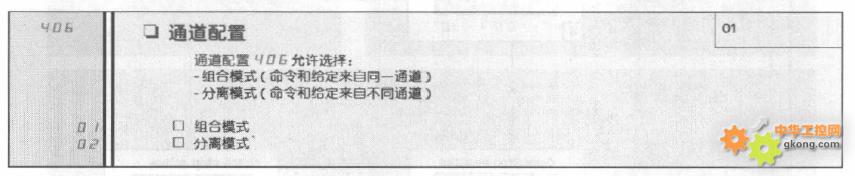
设置MODBUS通信参数,并对ATV303进行重启后通信参数生效,设置为分离模式
![附件 3.jpg]()
设置命令通道
![附件 4.jpg]()
![附件 5.jpg]()
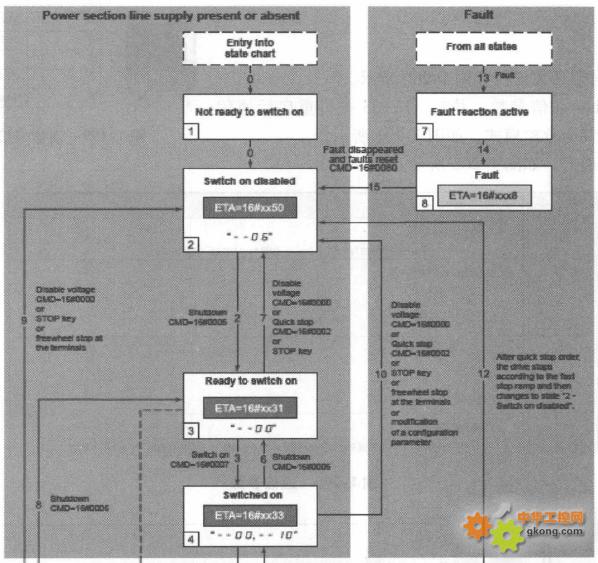
设置为modbus通信.ATV303的通信控制流程必须准寻DRIVECOM流程如下图
这个图很重要.基本所有的ATVmodbus通讯都是这个流程,挺闹心的
后来高级点的ATV有IO模式,,就简单多了
![附件 6.jpg]()
![附件 7.jpg]()
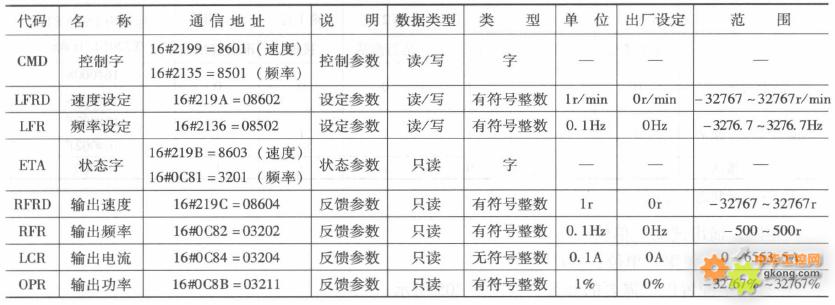
这个流程中,需要用到一下变量参数.
![附件 8.jpg]()
CMD:命令字
![附件 9.jpg]()
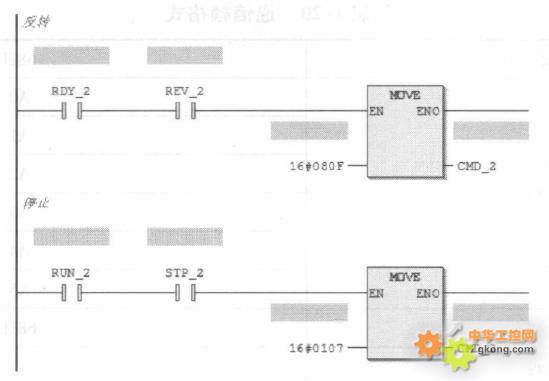
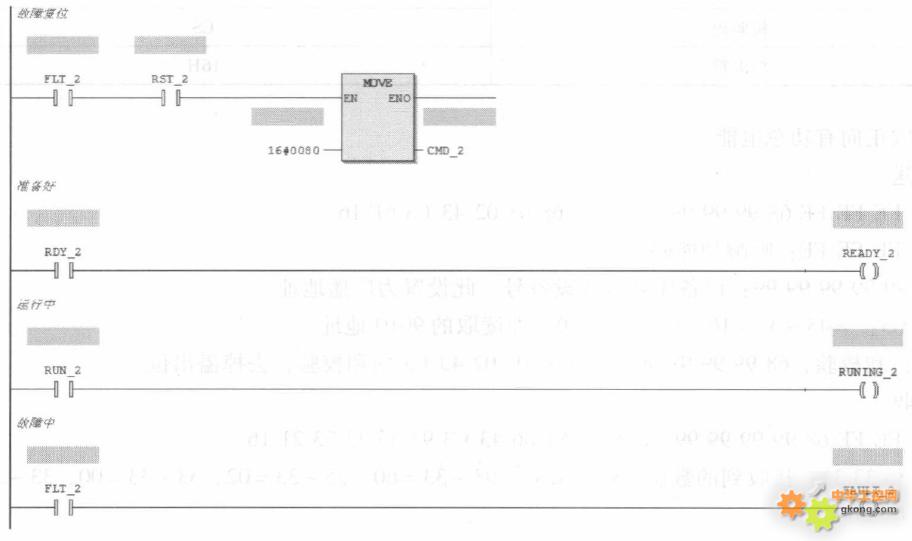
常用命令字:16#000F:正转;16#080F 反转;16#0107以设定停车方式停车;
16#0002快速停车;16#0080 故障复位.
LFRD:速度设定,单位:1r/min
LFR:频率设定,单位:0.1Hz
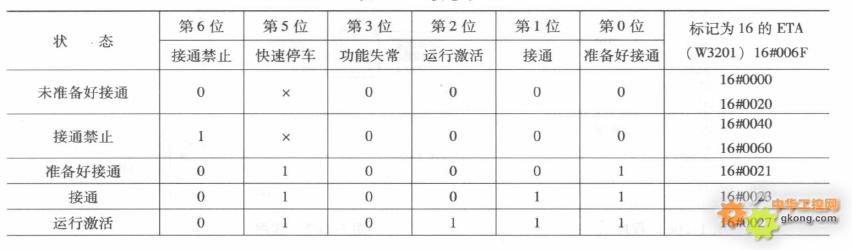
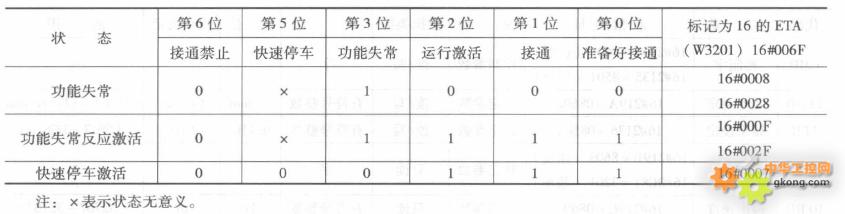
ETA:状态字
![附件 10.jpg]()
![附件 11.jpg]()
RFRD:输出速度,单位:1r/min
RFR:输出频率,单位:0.1Hz
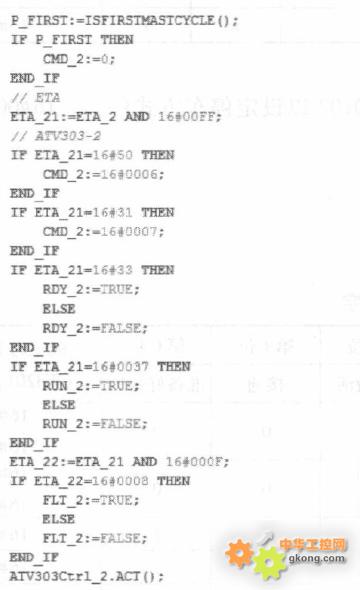
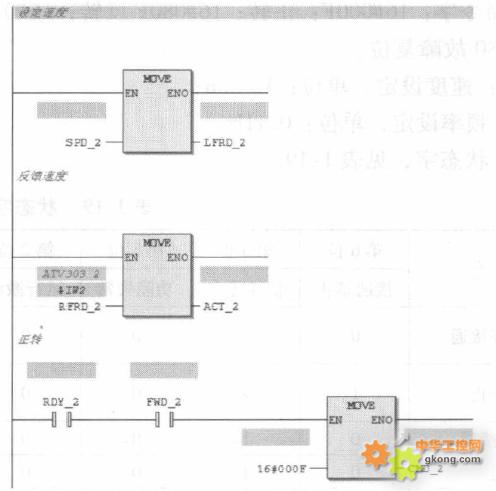
在程序中配置以上需要的参数.
![附件 12.jpg]()
程序图与例程下载在楼下.
这个案例挺好用的
ATV303通信端口定义如图
M2X8与ATV303的通信接线:
D1........4
D0........5
GND.......8
ATV303通信参数设置如图
设置MODBUS通信参数,并对ATV303进行重启后通信参数生效,设置为分离模式
设置命令通道


设置为modbus通信.ATV303的通信控制流程必须准寻DRIVECOM流程如下图
这个图很重要.基本所有的ATVmodbus通讯都是这个流程,挺闹心的
后来高级点的ATV有IO模式,,就简单多了

这个流程中,需要用到一下变量参数.
CMD:命令字

常用命令字:16#000F:正转;16#080F 反转;16#0107以设定停车方式停车;
16#0002快速停车;16#0080 故障复位.
LFRD:速度设定,单位:1r/min
LFR:频率设定,单位:0.1Hz
ETA:状态字
RFRD:输出速度,单位:1r/min
RFR:输出频率,单位:0.1Hz
在程序中配置以上需要的参数.

程序图与例程下载在楼下.
水平一般,能力有限.如有错误之处.欢迎并感谢指出.我一定认真学习积极改正.请勿DISS.