














发表于:2019/10/9 13:23:30
#0楼
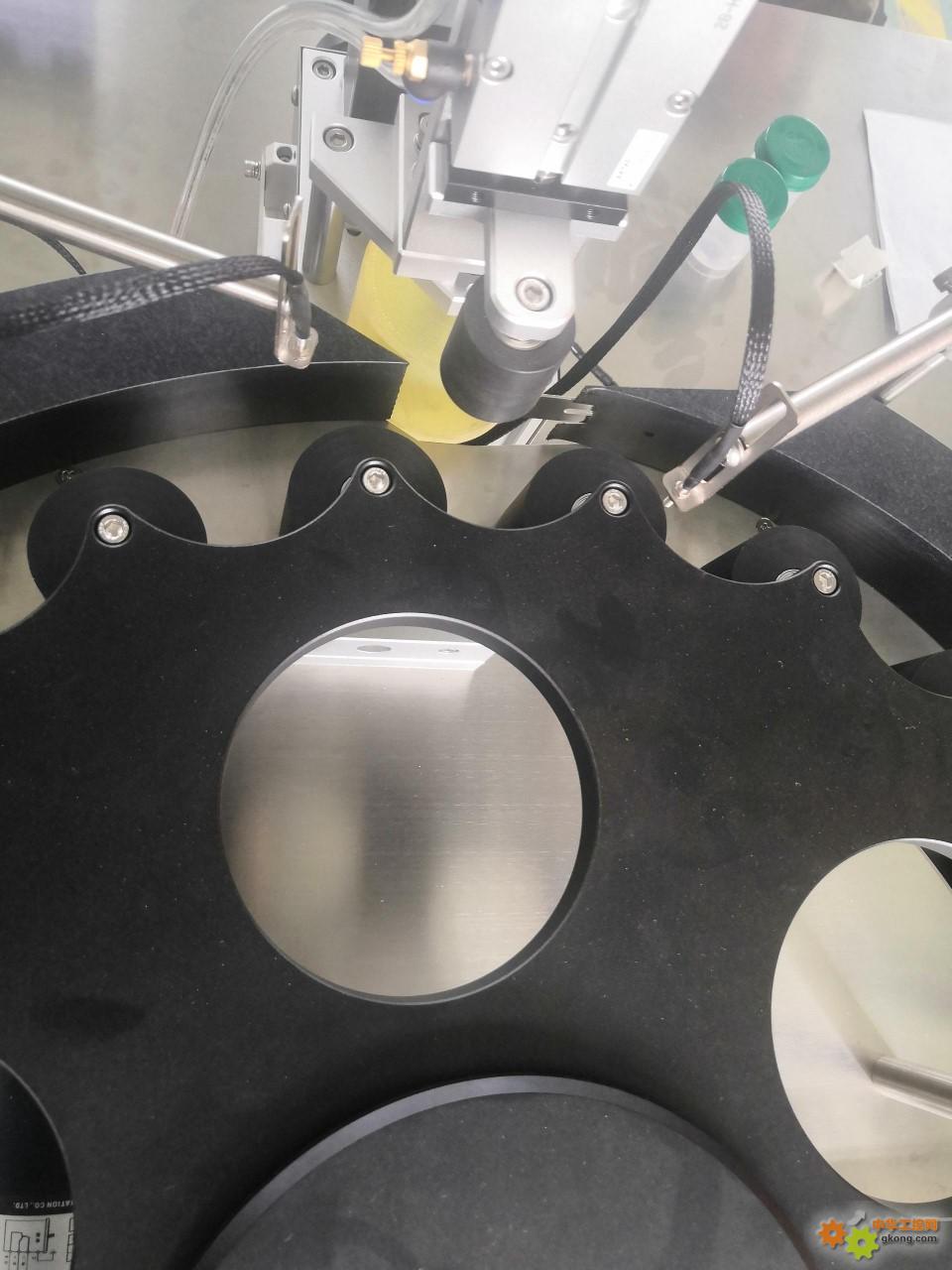
如图,一个转台,上面分很多工位,假定为20个工位,每次转动一个工位,停止,加工;然后启动再转一个工位,停止,加工,如此反复。也就是每次转动18度
1.旋转电机为伺服电机,通过同步带传动,带动中心主轴。如何保证重复定位精度?
即 用伺服电机,我转第一圈的时候,依次为18度,36度,54度,。。。。。360度。
那么转N(N可以为2,也可以为2000000000)圈以后,它的18度和第一圈的18度对应的位置有多大误差呢? 不可能每转一圈就回零。
伺服电机选增量式还是单圈绝对值,还是多圈绝对值呢? 注意电机一直朝一个方向转的。
2.图中每转18度停止以后,转台并没有立即停止。 而是抖动几下才停止。 这个是什么原因呢?
刚性?减速参数? 如何从机械和电器控制两方面解决抖动问题?
![附件 转台1.jpg]()
![附件 转台2.jpg]()
![附件 转台底部传动.jpg]()
1.旋转电机为伺服电机,通过同步带传动,带动中心主轴。如何保证重复定位精度?
即 用伺服电机,我转第一圈的时候,依次为18度,36度,54度,。。。。。360度。
那么转N(N可以为2,也可以为2000000000)圈以后,它的18度和第一圈的18度对应的位置有多大误差呢? 不可能每转一圈就回零。
伺服电机选增量式还是单圈绝对值,还是多圈绝对值呢? 注意电机一直朝一个方向转的。
2.图中每转18度停止以后,转台并没有立即停止。 而是抖动几下才停止。 这个是什么原因呢?
刚性?减速参数? 如何从机械和电器控制两方面解决抖动问题?


[此贴子已经被作者于2019/10/9 13:25:29编辑过]
机器视觉+ARM




