














发表于:2019/9/29 10:37:41
#0楼
本文介绍施耐德电气Modicon M262运动控制器控制LXM32S伺服的实现
系统构架是这个样子滴:
![附件 image.jpg]()
EcoStruxure Machine Expert组态:
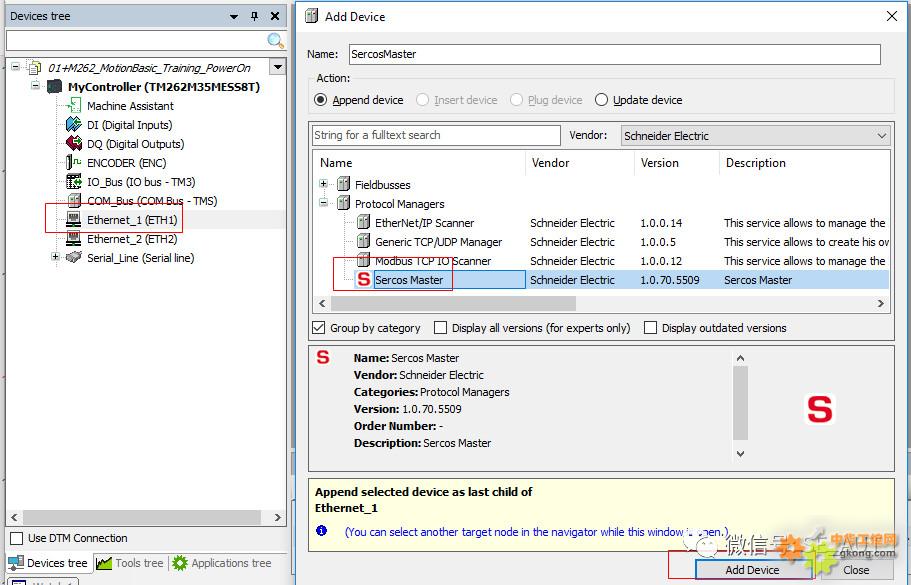
1、右键"Ethernet_1"添加设备,选择"Sercos Master";
![附件 image.jpg]()
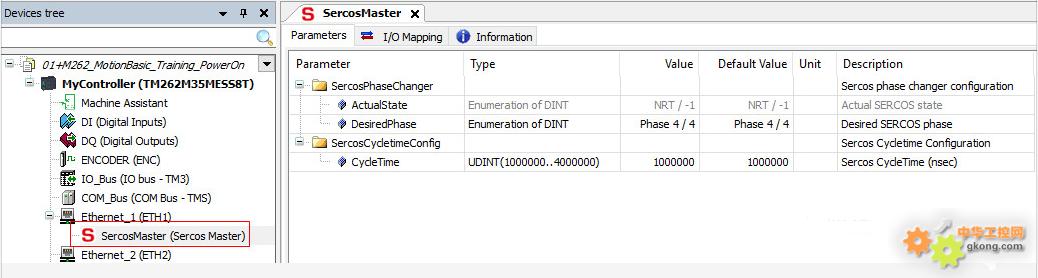
双击"Sercos Master"可看到Sercos通信状态和循环时间设置;
![附件 image.jpg]()
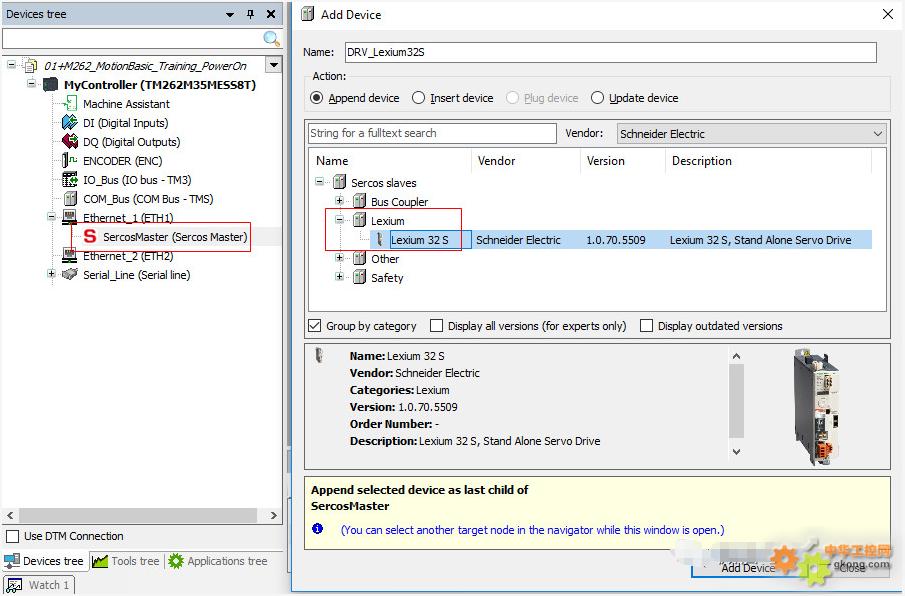
2、右键"Sercos Master"添加设备,选择"Lexium 32S";
![附件 image.jpg]()
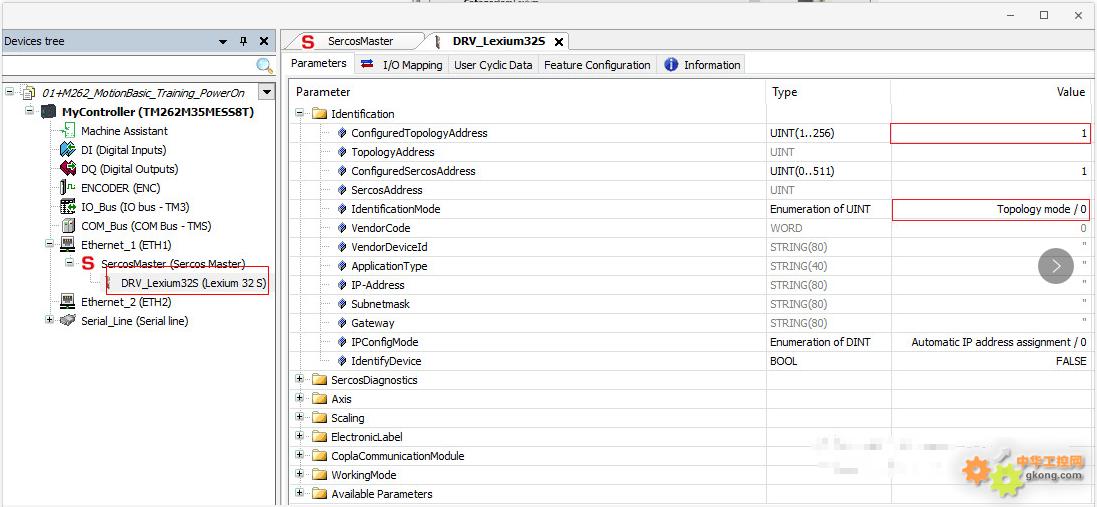
双击"DRV_Lexium32S",确定拓扑地址和模式(默认值);
![附件 image.jpg]()
3、"Scaling"选项配置;
![附件 image.jpg]()
默认360个用户单位电机运转一圈;
如有修改齿轮比,则对应:
PositionResolution*(GearIn/GearOut)个用户单位转一圈;
举例:
PositionResolution=360,
GearIn=2
GearOut=1,
则:
360*(2/1)=720
给定720个用户单位电机转一圈;
编写程序:
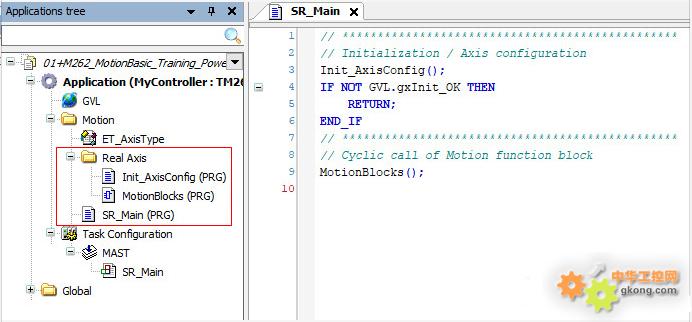
1、初始化
Sercos通信状态机
![附件 image.jpg]()
![附件 image.jpg]()
M262上电启动后,Sercos通信状态为NRT,需要自行在应用程序中将状态切为4;
![附件 image.jpg]() 注意:
注意:
如果需要在程序中初始化轴配置,如Scaling,AxisType,position period等,必须在状态切换为4之前进行配置;
2、调用PLCO库中的运动功能块
![附件 image.jpg]()
![附件 image.jpg]() 注意:
注意:
1、DRV_Lexium32S为组态时添加伺服的名称,必须取其Axis变量接入功能块Axis管脚,轴名称也可自行更改;
2、若功能块的实例在GVL全局变量中声明,调用时必须加前缀GVL;
3、完整程序结构如下:
![附件 image.jpg]()
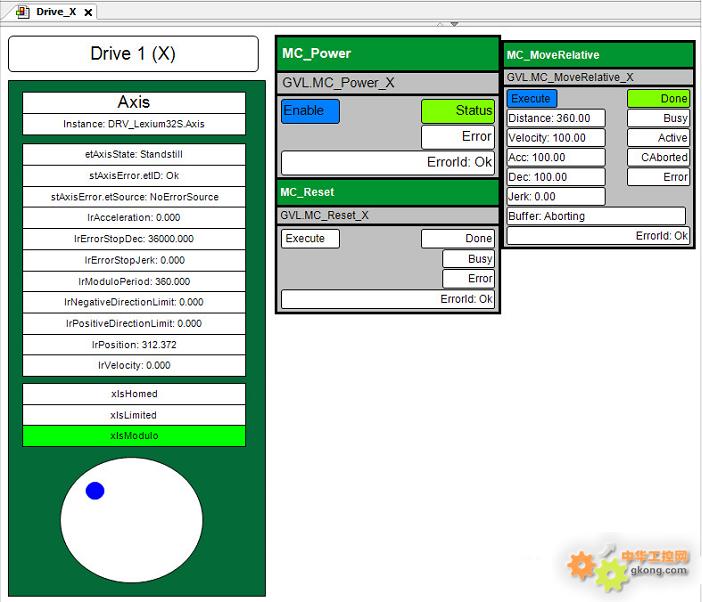
可视化实现
![附件 image.jpg]()
以上转自SE_AUT
系统构架是这个样子滴:

EcoStruxure Machine Expert组态:
1、右键"Ethernet_1"添加设备,选择"Sercos Master";
双击"Sercos Master"可看到Sercos通信状态和循环时间设置;
2、右键"Sercos Master"添加设备,选择"Lexium 32S";
双击"DRV_Lexium32S",确定拓扑地址和模式(默认值);
3、"Scaling"选项配置;
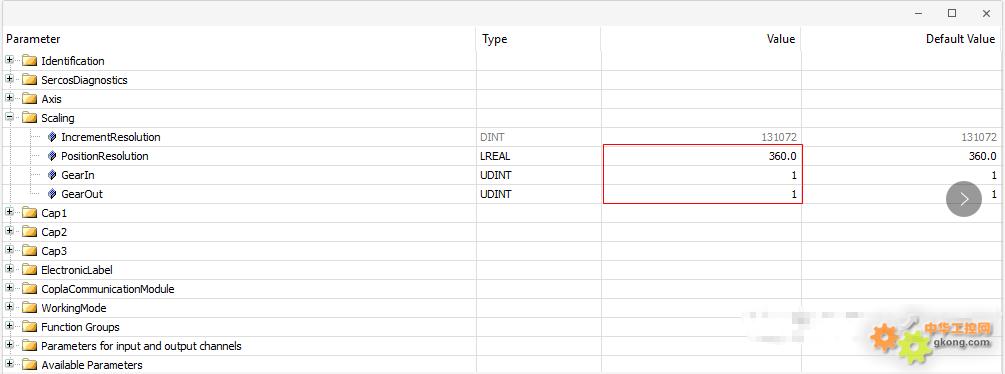
默认360个用户单位电机运转一圈;
如有修改齿轮比,则对应:
PositionResolution*(GearIn/GearOut)个用户单位转一圈;
举例:
PositionResolution=360,
GearIn=2
GearOut=1,
则:
360*(2/1)=720
给定720个用户单位电机转一圈;
编写程序:
1、初始化
Sercos通信状态机
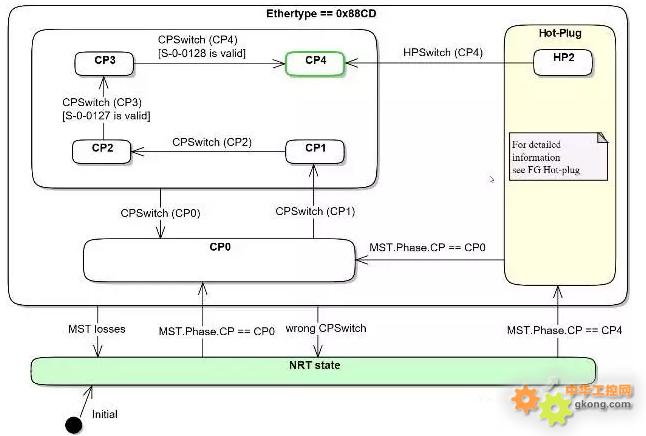
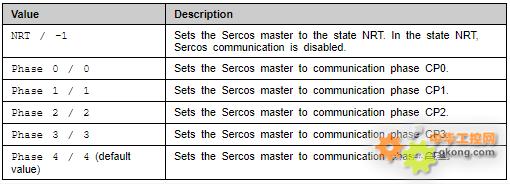
M262上电启动后,Sercos通信状态为NRT,需要自行在应用程序中将状态切为4;

如果需要在程序中初始化轴配置,如Scaling,AxisType,position period等,必须在状态切换为4之前进行配置;
2、调用PLCO库中的运动功能块
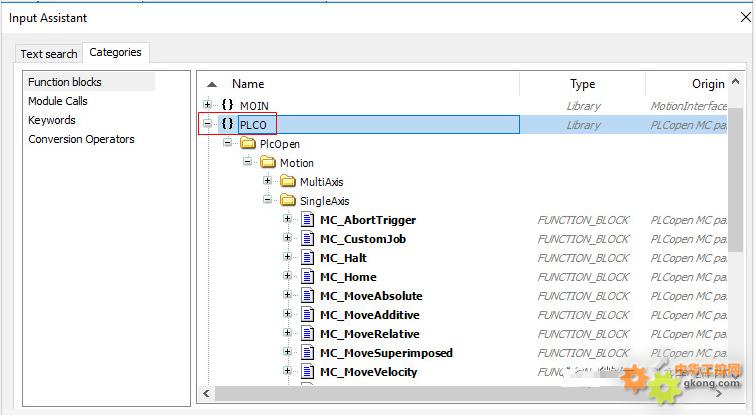
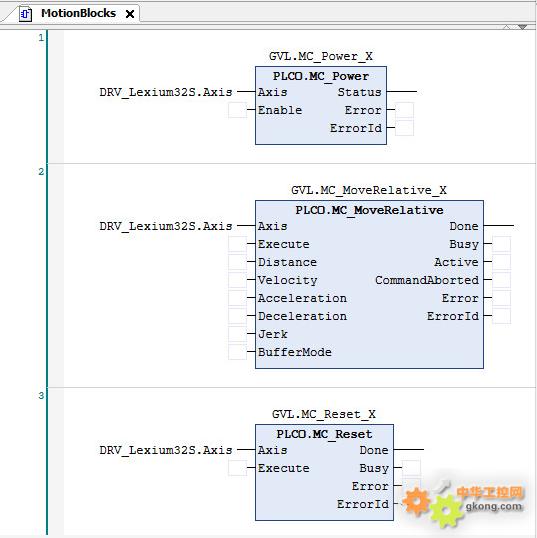
1、DRV_Lexium32S为组态时添加伺服的名称,必须取其Axis变量接入功能块Axis管脚,轴名称也可自行更改;
2、若功能块的实例在GVL全局变量中声明,调用时必须加前缀GVL;
3、完整程序结构如下:
可视化实现
以上转自SE_AUT
温馨提示:
电话:0755-26546361
邮箱:blog@gkong.com
微信公众号:工控论坛;微信号gkongbbs;
不定期修改账号密码;不要在多个网站用同一账号密码
可随时站内信联系,工作日可拨打电话或发邮件咨询相关问题
电话:0755-26546361
邮箱:blog@gkong.com
微信公众号:工控论坛;微信号gkongbbs;
不定期修改账号密码;不要在多个网站用同一账号密码
可随时站内信联系,工作日可拨打电话或发邮件咨询相关问题



