














发表于:2019/9/25 18:29:22
#0楼
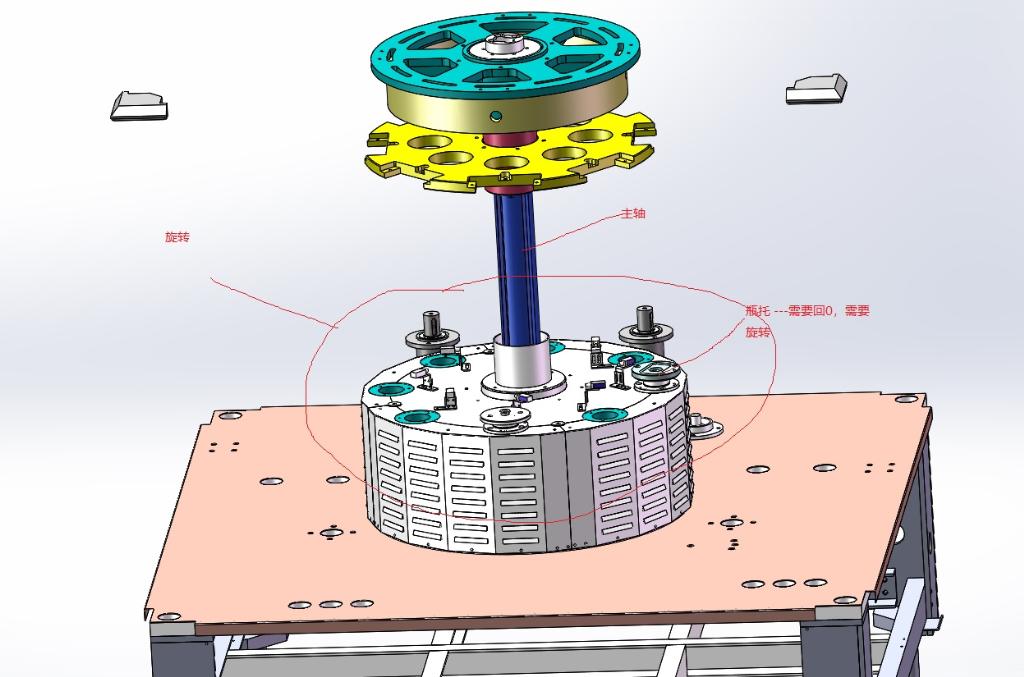
如图,为一旋转台,上面带8个工位瓶托,瓶托上面的瓶子自身也需要旋转;
所以用了伺服电机;
转台连续旋转,,旋转到某个工位的时候,瓶托自身伺服要旋转,以配合外界
的机构对其贴标; ,每个工位上的瓶子加工总时间不会超过0.15秒;
要求在0.15秒内完成信号采集,通信,伺服启动,运转一定角度(不超过360度),结束。
问题来了
1.图中8个伺服和远端的PLC采用什么方式比较好比较快速?
目前采用的是MODBUS_RTU 效果不理想,也采用了多位置脉冲输出模块
2.图中转台外壳里面放着8个伺服,跟随转台一起旋转。这显然是不合理的。
希望改成8个瓶托电机在转台上,伺服驱动器不能放置在转台上。不知道能否实现?
需要考虑主轴和旋转台都是旋转的,远端的PLC柜是静止的,供电可以考虑电滑环,但信号线不能
多,不然不好走线
![附件 带机构旋转的转台.jpg]()
所以用了伺服电机;
转台连续旋转,,旋转到某个工位的时候,瓶托自身伺服要旋转,以配合外界
的机构对其贴标; ,每个工位上的瓶子加工总时间不会超过0.15秒;
要求在0.15秒内完成信号采集,通信,伺服启动,运转一定角度(不超过360度),结束。
问题来了
1.图中8个伺服和远端的PLC采用什么方式比较好比较快速?
目前采用的是MODBUS_RTU 效果不理想,也采用了多位置脉冲输出模块
2.图中转台外壳里面放着8个伺服,跟随转台一起旋转。这显然是不合理的。
希望改成8个瓶托电机在转台上,伺服驱动器不能放置在转台上。不知道能否实现?
需要考虑主轴和旋转台都是旋转的,远端的PLC柜是静止的,供电可以考虑电滑环,但信号线不能
多,不然不好走线
机器视觉+ARM






