发表于:2019/7/31 15:14:23
#0楼
本例为研控 ESS57-C21 系列步进电机的 CANOPEN 配置方法,使用硬件为西门子 1200PLC,开疆智能 canopen 转 profinet 转换网关(型号:KJ-PNG-105)研控步进电机(型号:ESS57-C21)软件为西门子博图 v15
网关配置软件
![附件 1.jpg]()
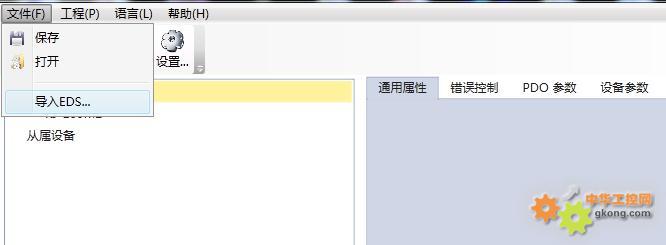
第一步:导入 EDS 文件
![附件 2.jpg]() 第二步:添加主设备
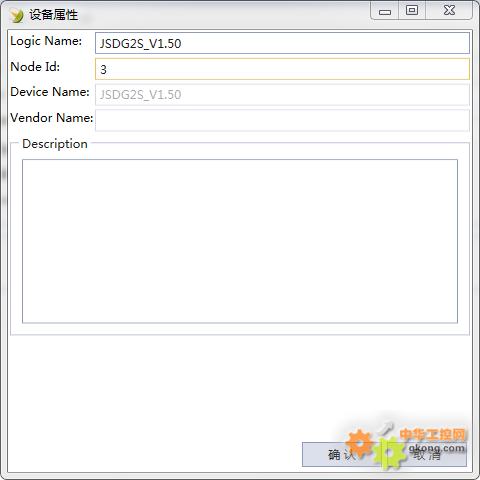
第二步:添加主设备
![附件 3.jpg]()
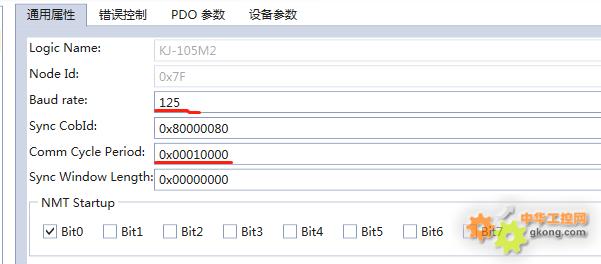
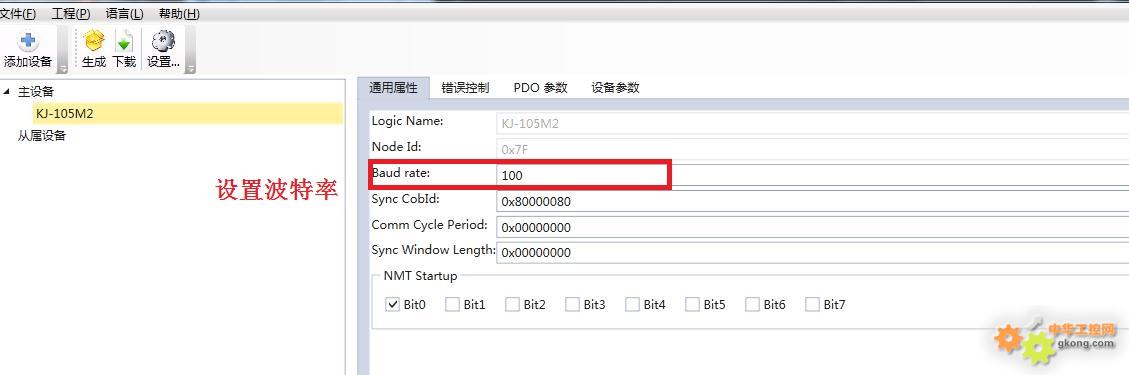
第三步:设定网关参数
![附件 4.jpg]()
![附件 5.jpg]()
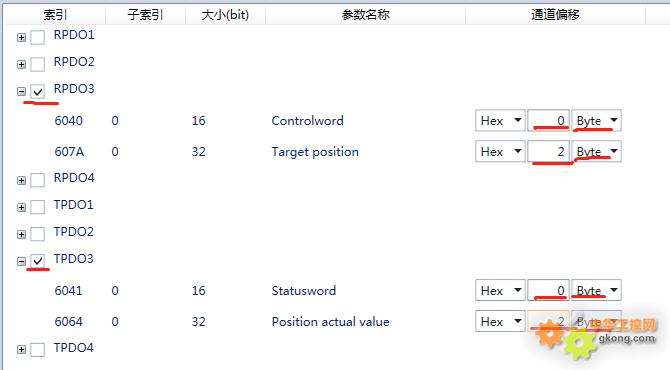
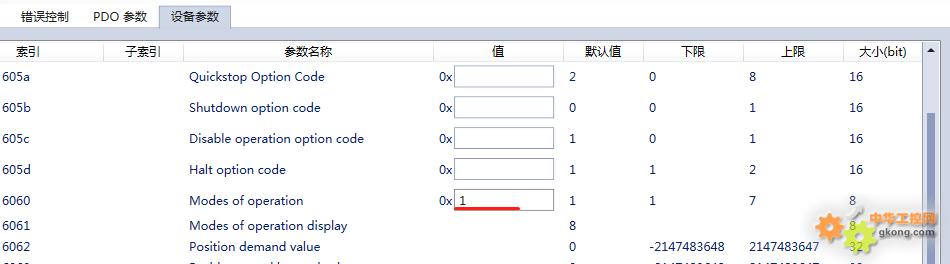
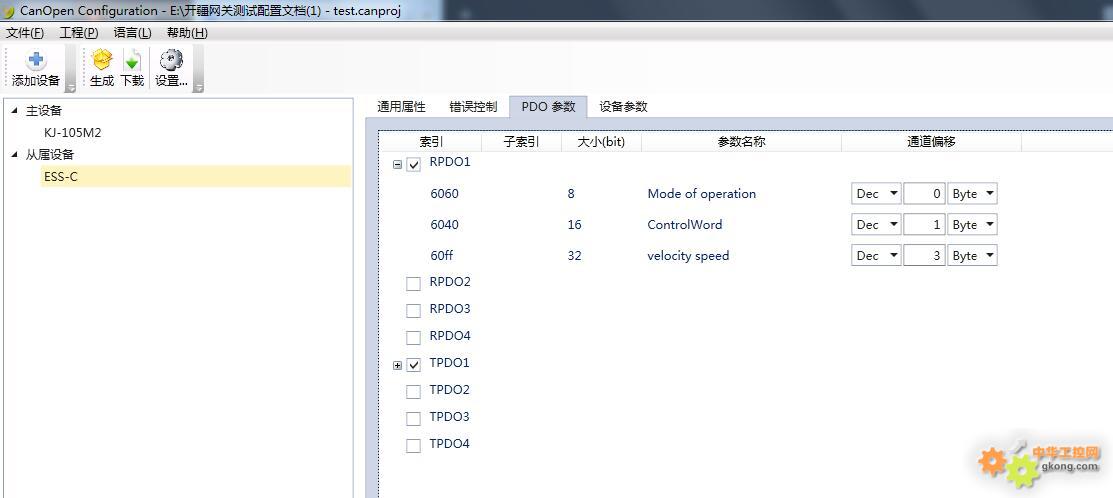
第四步:添加从设备并设置参数
![附件 6.jpg]()
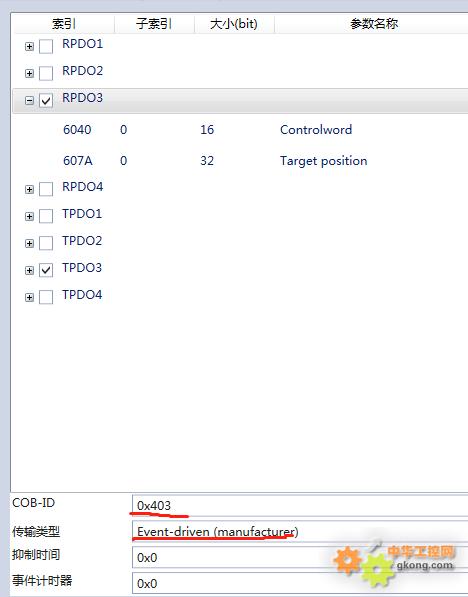
以速度模式为例:
![附件 16.jpg]() 配置完后生成下载 (注意,一定要先点击生成,之后点击下载。在此之前可以先点击设置配置下载线 COM 口)
配置完后生成下载 (注意,一定要先点击生成,之后点击下载。在此之前可以先点击设置配置下载线 COM 口)
![附件 7.jpg]()
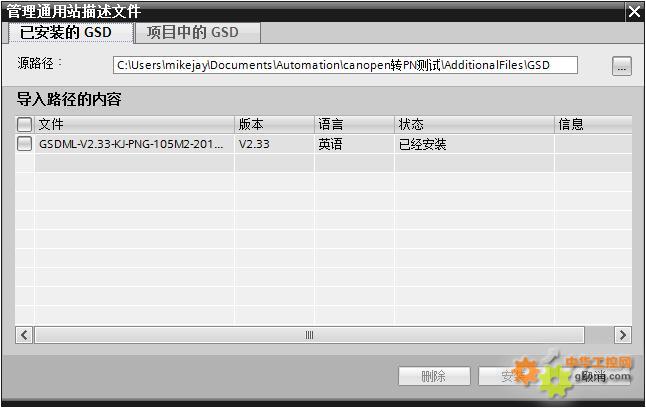
第五步设置博途组态 先添加 gsd 文件
![附件 8.jpg]()
![附件 9.jpg]()
在右侧选择对应型号网关
![附件 10.jpg]()
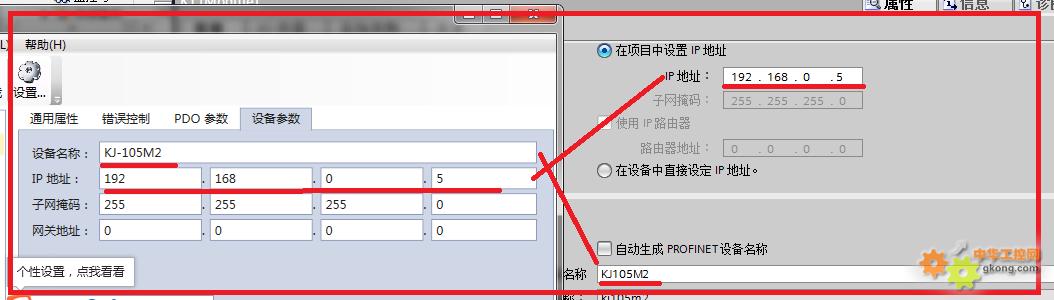
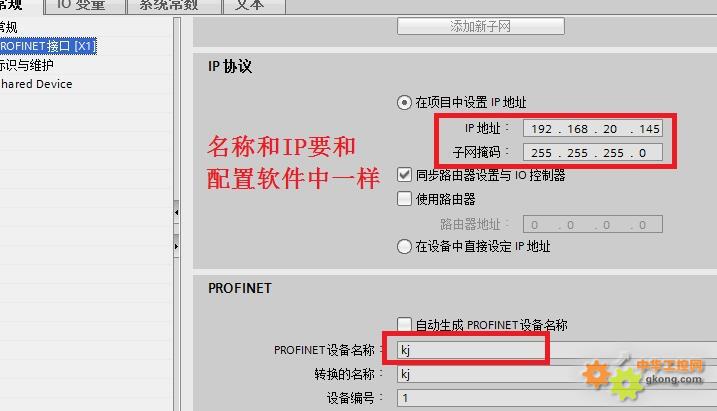
第六步:设置设备名称及设备 IP
![附件 11.jpg]()
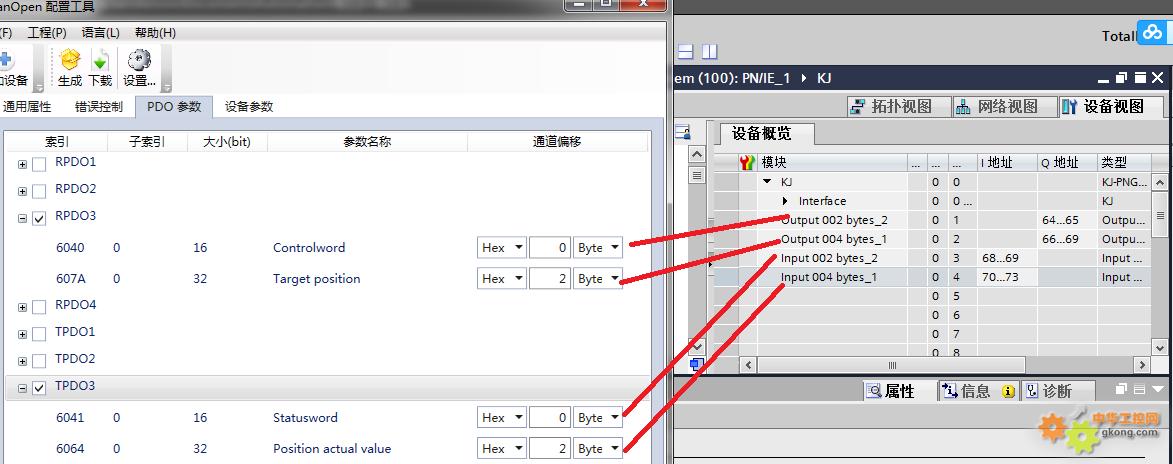
第七步:设置输入输出字节数 上图中按参数数据大小分别占据 1 个字节 2 个字节和 4 个字节所以起始位分别填写 0,1,3。因总共占用 7 个字节 所以博途中选择 8 个字节或者分别添加 1,2,4 字节。
![附件 12.jpg]()
![附件 13.jpg]()
第八步:下载组态至 PLC 中
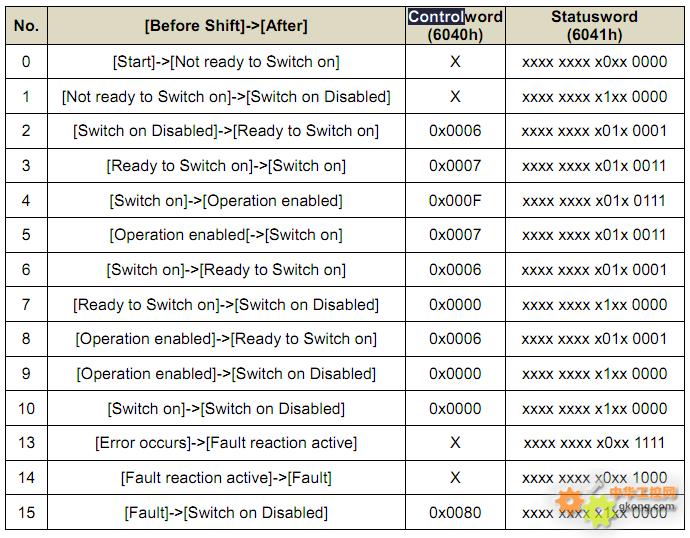
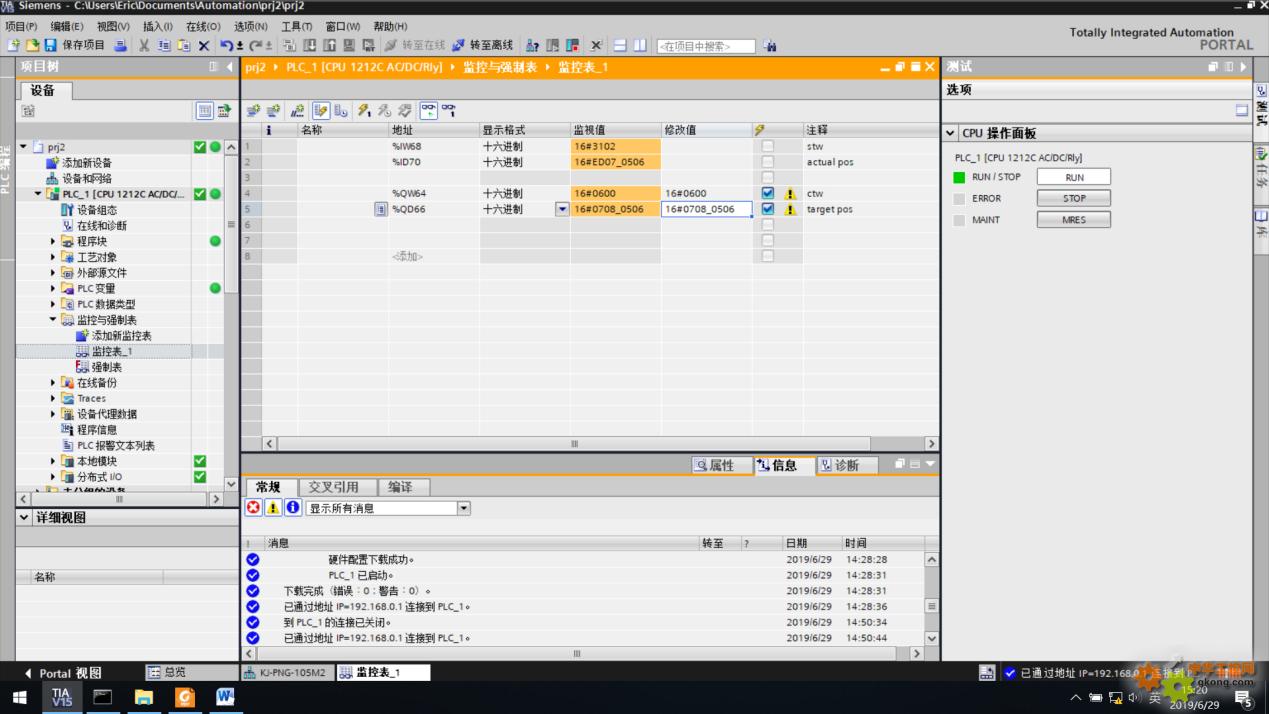
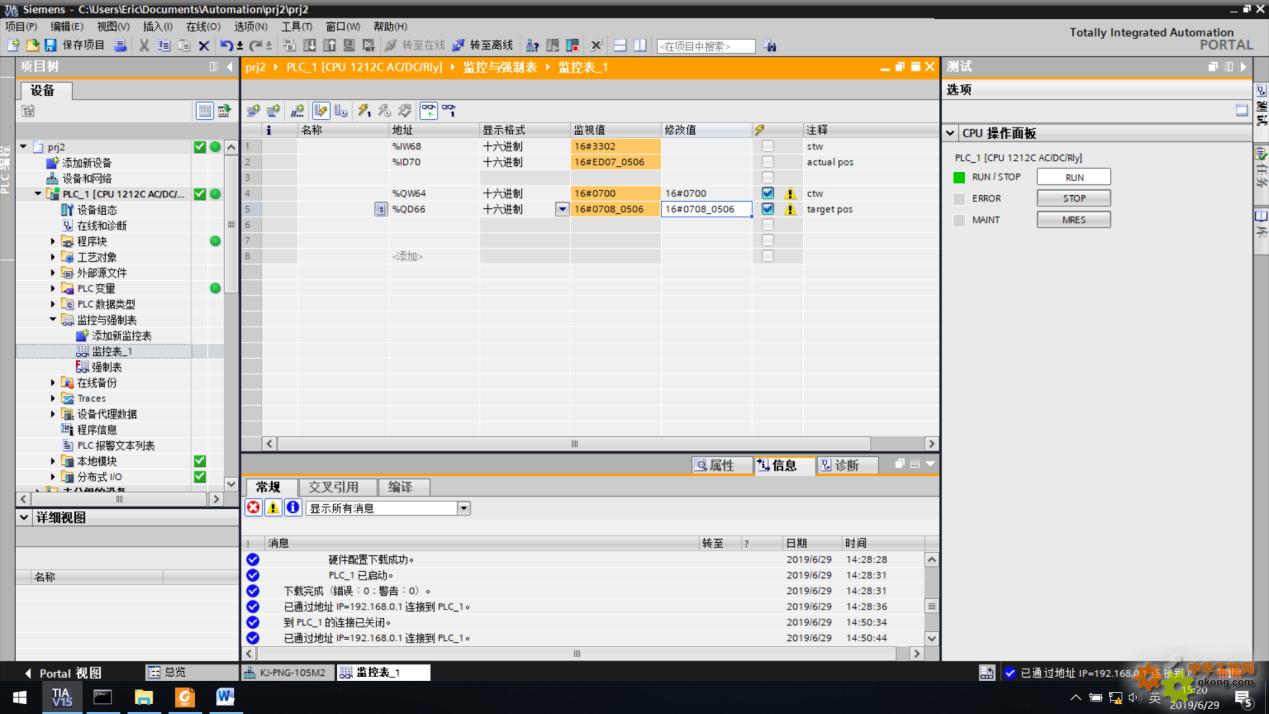
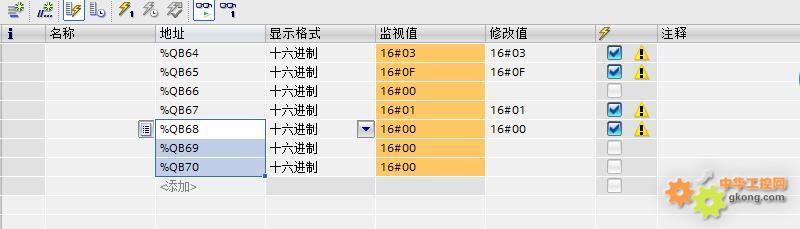
第九步:打开监控表分别监视 QB64~QB70 QB64 对应 Mode of operation 即模式选择,输入 03 选择速度模式 QB64~66 对应电机控制字依次写入 06,07,0F 启动电机 QB67 对应速度写值后电机开始运转
![附件 14.jpg]()
网关配置软件

第一步:导入 EDS 文件

第三步:设定网关参数

第四步:添加从设备并设置参数

以速度模式为例:

第五步设置博途组态 先添加 gsd 文件

在右侧选择对应型号网关

第六步:设置设备名称及设备 IP
第七步:设置输入输出字节数 上图中按参数数据大小分别占据 1 个字节 2 个字节和 4 个字节所以起始位分别填写 0,1,3。因总共占用 7 个字节 所以博途中选择 8 个字节或者分别添加 1,2,4 字节。


第八步:下载组态至 PLC 中
第九步:打开监控表分别监视 QB64~QB70 QB64 对应 Mode of operation 即模式选择,输入 03 选择速度模式 QB64~66 对应电机控制字依次写入 06,07,0F 启动电机 QB67 对应速度写值后电机开始运转
附件:
[本地下载]