














发表于:2019/7/9 10:00:32
#0楼
分享1个气动工装实际应用案例 ,有问题一起讨论。
连接冲床控制说明
一:启动流程
1:脚踏开关 X1 闭合 1 秒后,气缸 1 动作 Y9 上电,运行到前限位 X2 此时,红外检测开关 X3
开始检测
2:红外检测开关,从无到有内部开始计数一次。当计数 3 次到后气缸 2 动作 Y10 上电。气缸 2 动作 1 秒后 气缸 3 动作 Y11 上电 1 秒后 气缸上电 Y12 工作
二:关闭流程
1:脚踏开关 X1 断开,气缸 4 和气缸 3 回位,Y11 和 Y12 断电.等 1 秒气缸 2 和气缸 1 回位,Y9, Y10 断电。
接线说明 一:主电源
开关电源上 220 交流电,注意 LN 为交流接口。控制器的 13 脚接正极,14 脚接负极。正常上电控制器的电源指示灯会亮。注意控制器正负极不可接反。如果不确认接线前请与我司确认。
二:输入接线
1:输入共有 3 个,脚踏开关 X1,缸 1 前位检测 X2,红外问题检测 X3.其中。脚踏开关是一个 常 开 的 点 ( 继 电 器 12 脚 和 负 极 接 通 ) 2:气缸前限位检测开关是磁感应开关(黑色接继电器底座 11 脚,棕色接 24V 正极,蓝色接 24V 负极。)
3:红外检测是一个光纤开关(黑色接继电器底座 10 脚,棕色接 24V 正极,蓝色接 24V 负极。)
三:输出接线
说明:输出最大驱动 350MA 可直接接小型电磁阀接线如下
1:缸 1(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 8 脚)。
2:缸 2(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 7 脚)。
3:缸 3(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 6 脚)。
3:缸 4(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 5 脚)。
图例
![附件 image.jpg]()
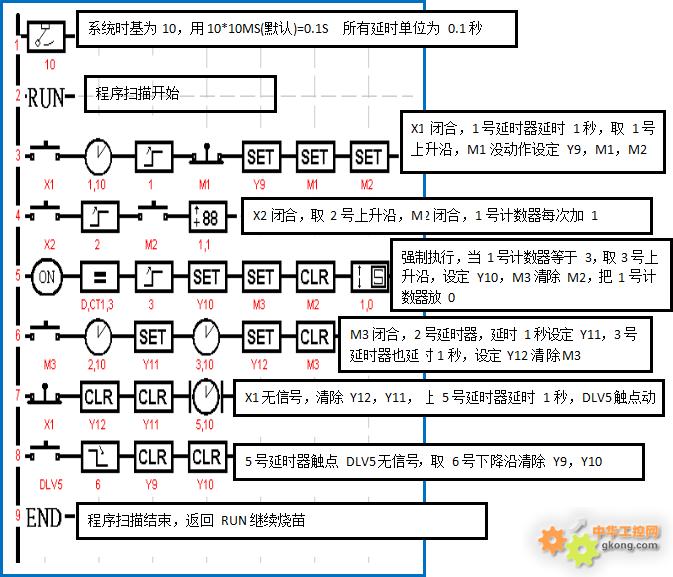
梯形图
![附件 image.jpg]()
连接冲床控制说明
一:启动流程
1:脚踏开关 X1 闭合 1 秒后,气缸 1 动作 Y9 上电,运行到前限位 X2 此时,红外检测开关 X3
开始检测
2:红外检测开关,从无到有内部开始计数一次。当计数 3 次到后气缸 2 动作 Y10 上电。气缸 2 动作 1 秒后 气缸 3 动作 Y11 上电 1 秒后 气缸上电 Y12 工作
二:关闭流程
1:脚踏开关 X1 断开,气缸 4 和气缸 3 回位,Y11 和 Y12 断电.等 1 秒气缸 2 和气缸 1 回位,Y9, Y10 断电。
接线说明 一:主电源
开关电源上 220 交流电,注意 LN 为交流接口。控制器的 13 脚接正极,14 脚接负极。正常上电控制器的电源指示灯会亮。注意控制器正负极不可接反。如果不确认接线前请与我司确认。
二:输入接线
1:输入共有 3 个,脚踏开关 X1,缸 1 前位检测 X2,红外问题检测 X3.其中。脚踏开关是一个 常 开 的 点 ( 继 电 器 12 脚 和 负 极 接 通 ) 2:气缸前限位检测开关是磁感应开关(黑色接继电器底座 11 脚,棕色接 24V 正极,蓝色接 24V 负极。)
3:红外检测是一个光纤开关(黑色接继电器底座 10 脚,棕色接 24V 正极,蓝色接 24V 负极。)
三:输出接线
说明:输出最大驱动 350MA 可直接接小型电磁阀接线如下
1:缸 1(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 8 脚)。
2:缸 2(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 7 脚)。
3:缸 3(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 6 脚)。
3:缸 4(24 伏电磁阀正极,接电源正。24 伏电磁阀负极,接控制器第 5 脚)。
图例

梯形图
[此贴子已经被jint于2019/7/9 10:42:13编辑过]



