













发表于:2019/5/15 17:00:34
#0楼
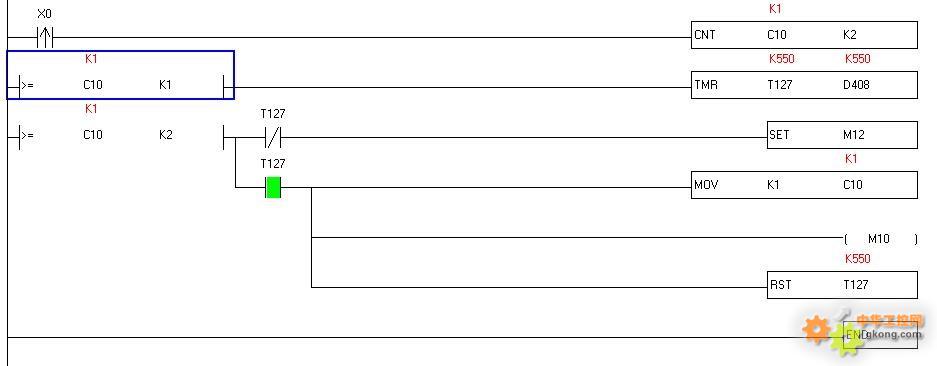
使用台达DVP24ES00R2写了这么一个简单逻辑,如下截图:
![附件 QQ浏览器截图20190515165250.jpg]() 大概实现判断物体运行速度是不是在设定的要求范围内。
大概实现判断物体运行速度是不是在设定的要求范围内。
固定轮间距的车在固定轨道上移动,轨道某处安装一传感器X0,首次车最前面的轮子移动到传感器位置,计数器C10计数加1(等于1),同时启动定时器T127(定时器设定时间D408)开始计时,当第二个轮子移动到传感器位置时,计数器C10计数加1(等于2),此时判断定时器时间是否已到设定时间,没到设定时间(T127闭点接通),说明车子移动两个轮子之间的距离所用时间短(车速过快),输出一个标志位;超过设定时间(T127开点接通),说明车子移动两个轮子之间的距离所用时间长(车速慢,在合理范围内),输出另一个标志位。(实质就是测量车子走过1、2轮间距的路程所用时间)
接着第三个轮子移到传感器位置,就测量移动2、3轮子之间距离所用时间是否超出设定时间。(实质就是接着不断测量车子走过2、3,3、4,4、5……轮间距的路程所用时间)
现在问题是,正确测量完走过1、2轮间距所用时间后,不管再怎么给X0信号,定时器一直不复位,定时值达到设定值状态。
问题出在哪里?什么原因?
![附件 微信截图_20190515172647.jpg]()

固定轮间距的车在固定轨道上移动,轨道某处安装一传感器X0,首次车最前面的轮子移动到传感器位置,计数器C10计数加1(等于1),同时启动定时器T127(定时器设定时间D408)开始计时,当第二个轮子移动到传感器位置时,计数器C10计数加1(等于2),此时判断定时器时间是否已到设定时间,没到设定时间(T127闭点接通),说明车子移动两个轮子之间的距离所用时间短(车速过快),输出一个标志位;超过设定时间(T127开点接通),说明车子移动两个轮子之间的距离所用时间长(车速慢,在合理范围内),输出另一个标志位。(实质就是测量车子走过1、2轮间距的路程所用时间)
接着第三个轮子移到传感器位置,就测量移动2、3轮子之间距离所用时间是否超出设定时间。(实质就是接着不断测量车子走过2、3,3、4,4、5……轮间距的路程所用时间)
现在问题是,正确测量完走过1、2轮间距所用时间后,不管再怎么给X0信号,定时器一直不复位,定时值达到设定值状态。
问题出在哪里?什么原因?
[此贴子已经被jint于2019/5/16 11:00:03编辑过]
苦逼的奋斗者







