发表于:2019/5/13 10:25:00
#0楼
耗时一天,时间有点长,主要注意几个方面,记录下来以免下次再苦思冥想
首先,位置控制免不了硬限位、软限位、复位等功能,通过V-ASSISTANT设置V90输入功能,如图2

图2
运行前就绪:
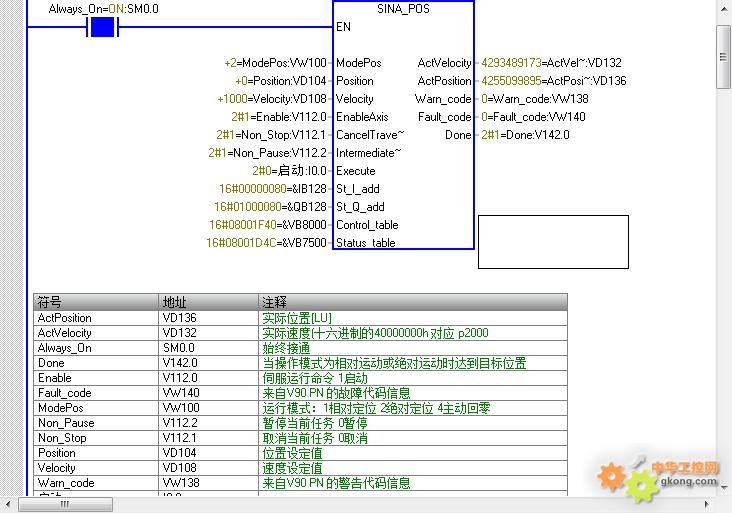
----运行模式选择ModePos=1/2
----轴使能EnableAxis=1
----CancelTraversing=1
----IntermediateStop=1
----速度倍率、加速度倍率、减速度倍率,分别对应Control_table中第2个字、第4个字、第6个字,程序中起始VB8000,所
以对应VW8002、VW8004、VW8006
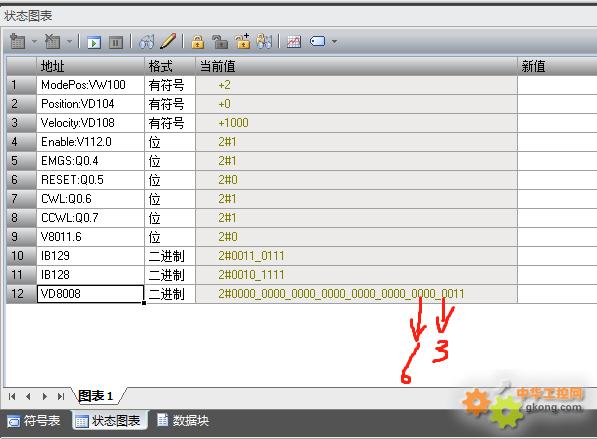
想当然地以为硬限位就是设置机器极限位置,一般情况下就是常闭即可,但是当我启动后,无论正方向、负方向都报错(到达正反方向凸轮),气的我牙痒痒。
弄了半天时间才发现,必须在启动信号给出后,再激活控制字节中的相应位,第3位为激活硬件限位,第6位为零点开关信号。这一点不知道是不是SINA_EPOS库的BUG

还有个回零的问题,运动控制中最关键的,前面讲过,原点信号通过ConfigEPos.%X6的下降沿,那么问题来了,为什么每次回零后,都有报警没有0脉冲信号呢,也让我百思不得其解。
----运行模式选择ModePos=4
----轴使能EnableAxis=1
----CancelTraversing=1
----IntermediateStop=1
----回零速率等功能通过驱动器设置,见图5
----运行方向通过Control_table第一个字节 (VB8000) 的第0位和第1位来设置(Postive/Negative)
经过慢慢摸索下才发现,ConfigEPos.%X6信号从接通到下降沿,伺服驱动器里是有最大距离限制的
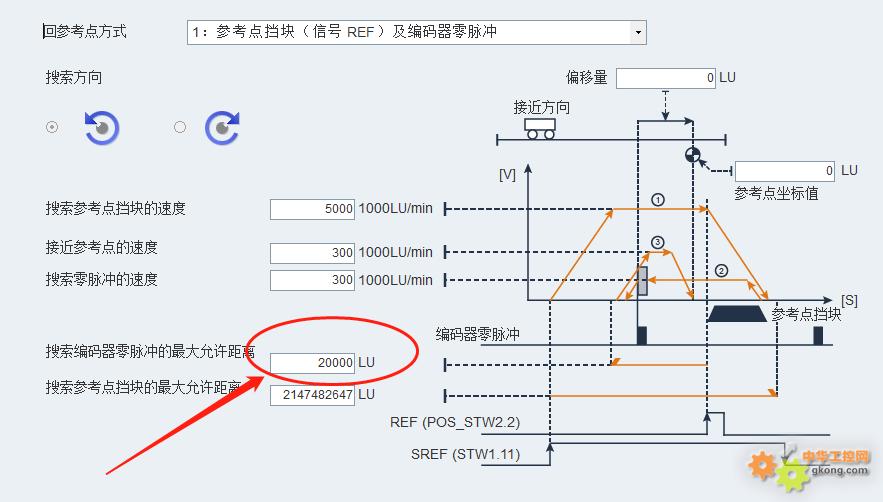
图5
文章讲的有点乱,其实大致方法网上都有,资料也好找,可能用的人少,没有人发现这个问题或者不屑一顾了吧。
[此贴子已经被作者于2019/5/13 10:27:51编辑过]
不被人嘲笑的梦想,就不值得去追求!